Các kỹ sư tại Viện California Công nghệ (Caltech) đã tạo ra một phần robot đi bộ và một phần máy bay không người lái được cho là có thể thực hiện các nhiệm vụ vận động phức tạp ngoài việc “đi bộ và bay đơn giản”. Robot hai chân LEONARDO (Legs ONboARD drOne, hay LEO) có thể đi trên dây chùng, nhảy lò cò và trượt ván cũng như bay nhờ nền tảng robot vận động đa phương thức.
Các nhà nghiên cứu cho biết, bằng cách tận dụng khả năng vận động lai này, nó có thể mở ra cơ hội cho một loạt ứng dụng mà robot mặt đất hoặc trên không khó có thể thực hiện được, chẳng hạn như các nhiệm vụ kiểm tra, sửa chữa hoặc thay thế đa điểm ở những vị trí mà con người khó tiếp cận. cũng như thúc đẩy sự phát triển của hệ thống thiết bị hạ cánh thích ứng bao gồm các khớp chân được điều khiển cho robot trên không và các phương tiện bay khác.
Các nhà nghiên cứu cho biết nền tảng này kết hợp các chế độ vận động bay và đi bộ bằng cách sử dụng điều khiển đồng bộ các bộ đẩy điện phân tán và một đôi chân nhiều khớp, cho phép thực hiện các chuyển động phức tạp, chẳng hạn như đi trên dây trượt hoặc trượt ván, vốn là thách thức đối với các robot hai chân hiện có. .


Các thao tác vận động của LEO. Click để xem ảnh rõ hơn. (Nguồn: Caltech)
Được phát triển bởi một nhóm tại Trung tâm Công nghệ và Hệ thống Tự động (CAST) của Caltech, LEO được cho là robot đầu tiên sử dụng chân nhiều khớp và bộ đẩy dựa trên cánh quạt để đạt được khả năng kiểm soát chính xác đối với khả năng giữ thăng bằng của nó. Nghiên cứu được báo cáo trong một bài báo xuất bản trực tuyến tại Science Robotics.
Theo bài nghiên cứu, LEONARDO thể hiện các chuyển động đi bộ với các động tác bay để vượt qua chướng ngại vật bằng cách sử dụng điều khiển đồng bộ các cánh quạt và khớp chân, điều này có khả năng thực hiện các nhiệm vụ và hoạt động của robot mà các robot vận động đơn phương thức không thể thực hiện được. Điều này có nghĩa là các robot có khả năng vận động đa phương thức sẽ chuyển đổi giữa chế độ đi bộ và bay khi cần thiết.
Các nhà nghiên cứu nhận xét trong bài báo: “So với robot mặt đất, LEO có thể vượt qua mọi chướng ngại vật bằng cách chuyển đổi giữa chế độ mặt đất và chế độ bay hoặc dễ dàng tiếp cận vị trí trên cao bằng cách sử dụng cánh quạt”. “Ngoài ra, trong khi robot trên không có thể bay lượn trên các mục tiêu thì LEO có thể sử dụng chuyển động trên mặt đất để tiếp cận chúng để kiểm tra kỹ hơn. Khi LEO tiếp xúc với mặt đất hoặc đi bộ, nó cũng có thể loại bỏ những nhiễu loạn lớn và ngăn ngừa rơi ngay cả trên các bề mặt cực kỳ trơn trượt bằng cách sử dụng điều khiển đồng bộ các cánh quạt và khớp chân được phân phối của nó, từ đó cho phép chuyển động đi bộ mạnh mẽ và chính xác hơn.”
Đây là những thông tin chi tiết. LEO có chiều cao khi đi là 75 cm và nặng 2.58 kg. Nó bao gồm ba hệ thống con chính: phần thân, hệ thống đẩy chân vịt và hai chân có bàn chân nhọn (xem hình ảnh bên dưới). Nó có thể hoạt động tự động nhờ các máy tính và cảm biến tích hợp. Tuy nhiên, các nhà nghiên cứu cho biết tốc độ đi bộ danh nghĩa là 20 cm/s, tốc độ mặt đất của nó có thể tăng đáng kể bằng cách bay không liên tục khi ở gần mặt đất.

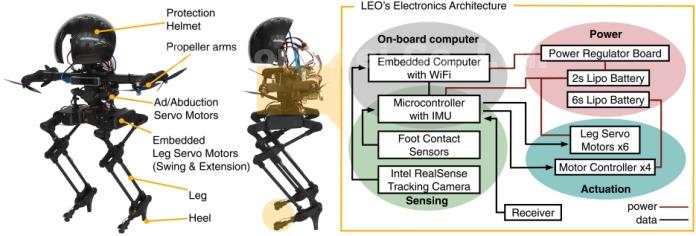
Chú thích: Các bộ phận cơ khí và điện tử chính của LEO. Click để xem ảnh rõ hơn. (Nguồn: Caltech)
Mỗi chân có ba động cơ servo (động cơ DC không chổi than) để truyền động: một động cơ di chuyển cấu trúc chân, trong khi hai bộ truyền động servo còn lại điều khiển cơ cấu chân song song. Động cơ BLDC kết hợp hộp số giảm tốc cao và điều khiển vị trí nhúng. Theo các nhà nghiên cứu, “Bộ điều khiển vị trí nhúng chính xác và đủ nhanh để điều khiển chân của LEO do quán tính thấp của chân và băng thông cao của bộ điều khiển cánh quạt giúp ổn định dáng đi”.
LEO cũng sử dụng bốn cánh quạt được đặt đối xứng trên vai để ổn định và kiểm soát các thao tác đi và bay. “Các trục quay của cánh quạt được chọn để cho phép tạo ra các mômen lăn, nghiêng và lệch theo cả hướng dương và âm về tâm khối (CoM) để bay và về vị trí chân đứng hiện tại để đi,” theo giấy.
Phần thân, kết nối cánh tay và chân thành một cụm, chứa hai máy tính tích hợp, nhiều cảm biến và hai pin lithium polymer (LiPo) để cấp nguồn cho hệ thống. Một máy tính giao tiếp với các cảm biến, nhận lệnh, ước tính trạng thái dựa trên kết quả đọc của cảm biến và tính toán quỹ đạo. Máy tính thứ hai, chạy bộ điều khiển đi bộ và điều khiển độ cao, giao tiếp trực tiếp với bộ truyền động chân và bộ điều khiển động cơ cánh quạt cũng như thiết bị đo quán tính (IMU) để biết thông tin về thái độ có độ trễ thấp.

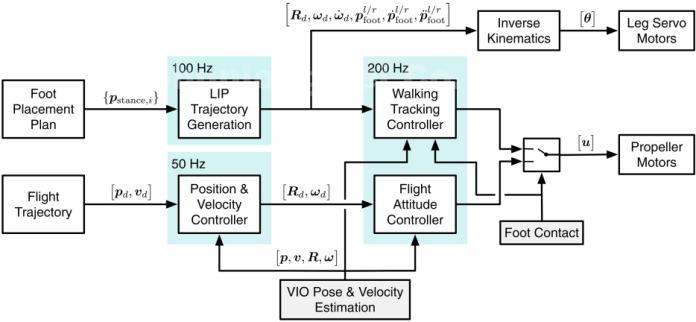
Chú thích: Kiến trúc điều khiển của LEO. Click để xem ảnh rõ hơn. (Nguồn: Caltech)
Nhóm Caltech đã thực hiện một số thử nghiệm cả ngoài trời và trong nhà. Các bài kiểm tra này bao gồm đi bộ trên địa hình bằng phẳng, bay và đi bộ đồng bộ, đi bộ và giữ thăng bằng trên sợi dây chùng và cưỡi ván trượt quanh cọc tiêu giao thông bằng cách sử dụng lực đẩy của cánh quạt.
Caltech báo cáo rằng các nhà nghiên cứu có kế hoạch tạo ra một thiết kế chân cứng hơn, có thể hỗ trợ nhiều trọng lượng của robot hơn và tăng lực đẩy của cánh quạt cũng như giúp robot tự chủ hơn. Họ cũng có kế hoạch bổ sung một thuật toán điều khiển hạ cánh bằng máy bay không người lái mới được phát triển sử dụng mạng lưới thần kinh sâu để giúp LEO hiểu rõ hơn về môi trường để đưa ra quyết định của riêng mình về sự kết hợp tốt nhất giữa chuyển động đi bộ, bay hoặc kết hợp.
Các đồng tác giả của bài báo bao gồm Soon-Jo Chung, Giáo sư Bren về Hàng không vũ trụ và Hệ thống điều khiển và động lực; Kyunam Kim, nhà nghiên cứu sau tiến sĩ tại Caltech; Patrick Spieler, cựu thành viên nhóm của Chung, hiện đang làm việc tại Phòng thí nghiệm Sức đẩy Phản lực, do Caltech quản lý cho NASA; Elena-Sorina Lupu (MS '21), nghiên cứu sinh tại Caltech, và Alireza Ramezani, cựu học giả sau tiến sĩ của Caltech và hiện là trợ lý giáo sư tại Đại học Northeastern. Nghiên cứu này được hỗ trợ bởi Quỹ Đổi mới Caltech Gary Clinard và Trung tâm Công nghệ và Hệ thống Tự trị của Caltech.