Ingenieurs van het California Institute of Technologie (Caltech) hebben een deels lopende robot en deels vliegende drone gemaakt die naar verluidt complexe voortbewegingstaken kan uitvoeren die verder gaan dan ‘eenvoudig lopen en vliegen’. De LEONARDO (Legs ONboARD drOne, of LEO) tweevoetige robot kan op een slackline lopen, springen, op een skateboard rijden en vliegen dankzij het multimodale voortbewegingsrobotplatform.
Door gebruik te maken van deze hybride voortbewegingsmogelijkheid, zeiden onderzoekers, zou het de deur kunnen openen naar een reeks toepassingen die moeilijk zijn voor grond- of luchtrobots, zoals meerpuntsinspectie, reparatie of vervangingstaken op locaties die moeilijk te bereiken zijn voor mensen. evenals de ontwikkeling van adaptieve landingsgestelsystemen, bestaande uit gecontroleerde beengewrichten voor luchtrobots en andere vliegende voertuigen.
Onderzoekers zeiden dat het platform, dat vliegende en lopende voortbewegingsregimes combineert met behulp van gesynchroniseerde besturing van gedistribueerde elektrische stuwraketten en een paar benen met meerdere gewrichten, de complexe bewegingen mogelijk maakt, zoals lopen op een slackline of skateboarden, die een uitdaging zijn voor bestaande tweevoetige robots. .


LEO's voortbewegingsmanoeuvres. Klik voor een grotere afbeelding. (Bron: Caltech)
Ontwikkeld door een team van Caltech's Center for Autonomous Systems and Technologies (CAST), zou LEO de eerste robot zijn die multi-joint poten en op propellers gebaseerde stuwraketten gebruikt om nauwkeurige controle over zijn balans te bereiken. Het onderzoek werd gerapporteerd in een paper die online is gepubliceerd op Science Robotics.
LEONARDO demonstreert loopbewegingen met vliegmanoeuvres om obstakels te overwinnen met behulp van gesynchroniseerde besturing van propellers en beengewrichten, wat mogelijk robotmissies en -operaties mogelijk zou kunnen maken die niet mogelijk zijn voor single-modale voortbewegingsrobots, aldus het onderzoekspaper. Dit betekent dat robots met multimodale voortbeweging naar behoefte schakelen tussen loop- en vliegmodus.
"Vergeleken met een grondrobot kan LEO elk obstakel overwinnen met behulp van de overgang tussen de grond- en vliegmodus of gemakkelijk een verhoogde locatie bereiken met behulp van propellers", aldus de onderzoekers in de paper. “Bovendien, terwijl een luchtrobot boven doelen kan zweven, kan LEO zijn grondbeweging gebruiken om ze te naderen voor nadere inspectie. Wanneer LEO in contact is met de grond of loopt, kan het ook grote verstoringen negeren en vallen voorkomen, zelfs op extreem gladde oppervlakken, door gebruik te maken van gesynchroniseerde besturing van de verspreide propellers en beengewrichten, waardoor een robuustere en nauwkeurigere loopbeweging mogelijk wordt.”
Hier zijn de details. LEO heeft een hoogte van 75 cm tijdens het lopen en weegt 2.58 kg. Het bestaat uit drie hoofdsubsystemen: een romp, een voortstuwingssysteem met een propeller en twee benen met puntpoten (zie onderstaande afbeelding). Hij kan autonoom opereren dankzij zijn boordcomputers en sensoren. De nominale loopsnelheid is 20 cm/s, maar volgens onderzoekers kan de grondsnelheid aanzienlijk toenemen door intermitterend vliegen dicht bij de grond te gebruiken.

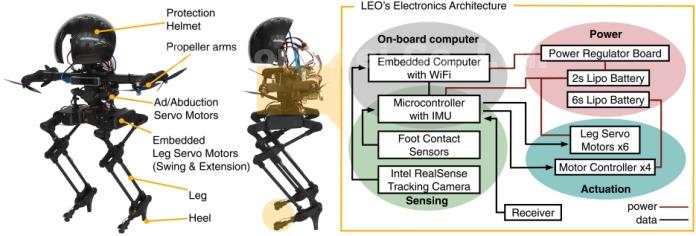
Bijschrift: LEO's belangrijkste elektronica en mechanische componenten. Klik voor een grotere afbeelding. (Bron: Caltech)
Elke poot heeft drie servomotoren (borstelloze gelijkstroommotoren) voor aandrijving: één beweegt de pootstructuur, terwijl de andere twee servoactuators het parallelle pootmechanisme aandrijven. De BLDC-motoren bevatten tandwielkasten met hoge reductie en ingebouwde positieregeling. "De ingebouwde positiecontroller is nauwkeurig en snel genoeg voor LEO's beencontrole vanwege de lage traagheid van de benen en de hoge bandbreedte van de propellercontroller die het looppatroon stabiliseert", aldus de onderzoekers.
LEO gebruikt ook vier symmetrisch geplaatste propellers op zijn schouders voor het stabiliseren en controleren van de loop- en vliegmanoeuvres. "De rotatie-assen van de propeller zijn geselecteerd om het genereren van rol-, stamp- en giermomenten mogelijk te maken in zowel positieve als negatieve richtingen rond het zwaartepunt (CoM) voor vliegen en rond de huidige standvoetlocatie voor lopen", aldus de papier.
De romp, die de armen en benen in één geheel verbindt, bevat twee boordcomputers, meerdere sensoren en twee lithium-polymeerbatterijen (LiPo) om het systeem van stroom te voorzien. Eén computer communiceert met de sensoren, ontvangt commando's, schat toestanden op basis van de sensormetingen en berekent de trajecten. De tweede computer, die de loop- en hoogtevluchtcontrollers aanstuurt, staat rechtstreeks in verbinding met de beenactuators en de propellermotorcontroller, evenals een traagheidsmeeteenheid (IMU) voor standinformatie met lage latentie.

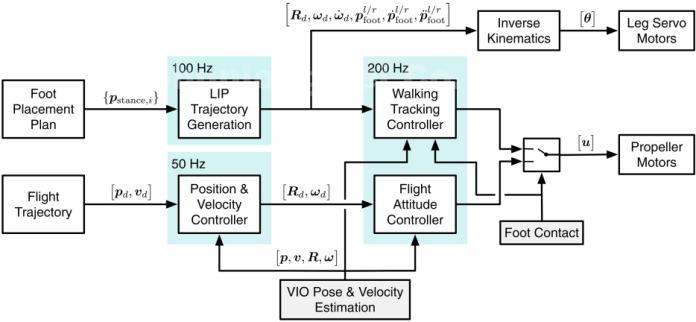
Bijschrift: Besturingsarchitectuur van LEO. Klik voor een grotere afbeelding. (Bron: Caltech)
Het Caltech-team heeft zowel binnen als buiten een aantal tests uitgevoerd. Deze tests omvatten lopen op een vlak terrein, synchroon vliegen en lopen, lopen en balanceren op een slap touw en op een skateboard rond verkeerskegels rijden door de stuwkracht van de propellers te gebruiken.
Caltech meldde dat de onderzoekers van plan zijn een stijver beenontwerp te maken dat meer van het gewicht van de robot kan dragen en de stuwkracht van de propellers kan vergroten en de robot autonomer kan maken. Ze zijn ook van plan om een nieuw ontwikkeld drone-landingsbesturingsalgoritme toe te voegen dat gebruikmaakt van diepe neurale netwerken die LEO zullen helpen een beter begrip van de omgeving te krijgen om zijn eigen beslissingen te nemen over de beste combinatie van lopen, vliegen of hybride beweging.
Co-auteurs van het artikel zijn onder meer Soon-Jo Chung, Bren Professor of Aerospace and Control and Dynamical Systems; Kyunam Kim, postdoctoraal onderzoeker bij Caltech; Patrick Spieler, een voormalig lid van Chung's groep die momenteel bij het Jet Propulsion Laboratory werkt, beheerd door Caltech voor NASA; Elena-Sorina Lupu (MS '21), afgestudeerde student aan Caltech, en Alireza Ramezani, voormalig Caltech-postdoctoraal wetenschapper en momenteel assistent-professor aan Northeastern University. Dit onderzoek werd ondersteund door het Caltech Gary Clinard Innovation Fund en Caltech's Center for Autonomous Systems and Technologies.