Engineers ad Californiae Institutum Technology (Caltech) partem robot ambulantem et partem fucum volantem creaverunt, qui parem munerum motuum complexum praestare possunt ultra simplices ambulationes et volantes. LEONARDO (Crura ONboard fucus, vel LEO) robot bipedalis remissa linea, salit et skate vehi potest necnon volare propter multimodis motivum roboticum suggestum.
Per hanc hybrid motivum capacitatem leveraging, investigatores dixerunt, portam aperire posse applicationum amplis quae sunt ad terram vel robots aereos difficiles, ut multi-punctum inspectionis, reparationis, vel repositi laboris in locis quae hominibus difficilia sunt attingere. itemque progressionem e portubus aptativarum adpulsu arcanorum comprehensarum compagum cruris continentium pro robots aereis aliisque vehiculis volantibus comprehendi.
Investigatores dixerunt suggestum, quod volatilium et ambulationem regiminum motuum componit utens synchronum imperium electricum trusores distributum et par crurum multi- iunctim, efficit complexus motus, ut ambulans in remissa vel skateboarding, quae provocant ad robots bipedales existentes. .


Leonis motus decursiones. Click for a larger image. (Source: Caltech)
LEO dicitur primus robot qui cruribus multis iuncturas utitur et trusores propellerantes ad praecisionem sui aequilibrii potestatem assequendam. Investigatio relata est in charta online in Scientia Robotica divulgata.
LEONARDO demonstrat motus ambulandi volitando decursiones ad impedimenta superanda utentes propellerum et cruris compagibus synchronum imperium, quod potentia missiones et operationes roboticae roboticae facere non possibilis sunt ad unum motivum motivum robotorum, secundum chartam investigationis. Hoc significat robots cum motu locali multimodali inter ambulandi et volandi modos ut necessarius transibit.
"Leo comparatus cum robot humo, omne impedimentum superare potest utens transitus inter terram suam et modos volantes vel facile ad altiorem locum utens propellers" commentati sunt investigatores in charta. "Praeterea, cum robot aeria super scuta volitare potest, LEO uti suo locomotionis loco ad eas propius inspiciendas accedere potest. Cum LEO in contactu vel ambulatione humi est, potest etiam magnas perturbationes rejicere ac ne in superficiebus admodum lubricis incidat, utendo moderamine synchroni distributorum propellentium et crurum, permittens ad motum ambulationis robustioris et accurati."
Hic sunt singularia. LEO altitudinem 75 cm habet quando ambulans et 2.58 kg gravat. Constat ex tribus subsystematibus principalibus: abdominis, propensionis systematis, et duorum crurum cum pedibus punctulis (vide infra imaginem). Potest autonome agere propter computatores et sensories. Celeritas ambulationis nominalis est 20 cm/s, quamquam investigatores dixerunt, celeritas eius terram suam signanter augere potest utendo volatu intermittente ad terram prope.

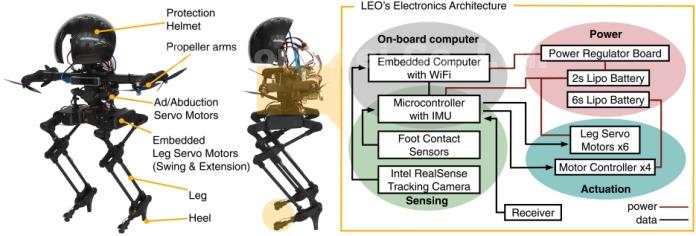
Caption: LEO praecipua electronica et mechanica. Click for a larger image. (Source: Caltech)
Quodlibet crus habet tres motores servo (matroces DC motores) pro actuatione: unum cruris structuram movet, alter duo actus servi machinationem cruris paralleli pellunt. Motores BLDC summa reductionis gearboxes incorporant et positio inclusa potestate. "Locus moderatoris immersatus" est praecisus et celer satis pro cruris Leonis inertia ob crurum inertiam et altam latitudinem propelleris moderatoris, qui incessus ambulationis stabilit, secundum inquisitores.
LEO etiam quattuor propellens scapulis suis symmetriis utitur ad stabiliendum et moderandum ambulationes et volatilia decursiones. "Axes propeller gyrationis selectae sunt ad momentum generationis volubilis, picis et oscitandi in directionibus tam positivis quam negativis circa centrum massae (CoM) volandi et circa statum pedis currentis locum ambulandi", secundum . chartac.
bustum, quae bracchia et crura in unum conventum nectit, domos duas cinematographicas invasores, sensores multiplices, et duos polymerorum lithium (LiPo) batteries ad systema comparandum. Unum computatorium cum sensoriis intercedit, mandata accipimus, civitates aestimat in lectionibus sensoriis fundatas et trajectorias computat. Secunda computatrix, quae ambulationem et altitudinem fugae moderatoris decurrit, directe intercedit cum actuatoribus cruris et propeller motore moderatoris necnon unitatis mensurae inertiae (IMU) ob informationes habitus humilitatis latency.

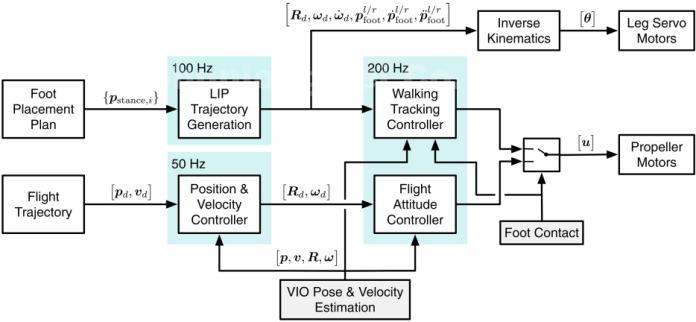
Caption: Architectura Imperii Leonis. Click for a larger image. (Source: Caltech)
Turma Caltech fecit plures probationes tam foris quam intus. Hae probationes in campis planis ambulans comprehendit, volitans et ambulans synchronised, ambulans et librans in remissa funem, et in skateboard circa pyramides negotiationis equitans, impulsu propellerum ejus utendo.
Caltech nuntiavit investigatores consilium cruris rigidiorem creare consilium quod plus ponderis roboti sustineat et impulsum impulsum vim propellerum augere possit ac robot plus sui iuris facere. Etiam instituunt addere algorithmum imperium noviter elaboratum fucum appulsum qui retiacula alta neural adhibet quae LEO adiuvabit melius de ambitu ad faciendum sua consilia de optima compositione ambulandi, volandi, aut hybridi motus faciendi.
Co-auctores chartarum comprehendunt mox Jo Chung, Bren Professorem Aerospace et Imperium et Systema Dynamical; Kyunam Kim, investigator postdoctoralis apud Caltech; Patrick Spieler, quondam sodalis coetus Chung qui nunc est cum Jet Propulsione Laboratorium, a Caltech pro NASA tractatum est; Elena-Sorina Lupu (MS '21) discipulus graduatus in Caltech, et Alireza Ramezani, olim Caltech scholaris postdoctoralis et nunc adiutor professor in Universitate Septentrionali. Haec investigatio per Innovationem Fundi et Caltech scriptor Centrum Caltech Gary Clinard sustentata est Systema Autonomia et Technologiae.