Engenheiros do Instituto de Equipar (Caltech) criaram um robô parcialmente ambulante e parcialmente um drone voador que supostamente pode realizar tarefas complexas de locomoção além de “simples caminhar e voar”. O robô bípede LEONARDO (Legs ONboARD drOne, ou LEO) pode andar em slackline, pular e andar de skate, bem como voar, graças à sua plataforma robótica de locomoção multimodal.
Ao alavancar essa capacidade de locomoção híbrida, disseram os pesquisadores, isso poderia abrir a porta para uma gama de aplicações que são difíceis para robôs terrestres ou aéreos, como inspeção de vários pontos, reparo ou tarefas de substituição em locais difíceis de serem alcançados por humanos. além de impulsionar o desenvolvimento de sistemas de trem de pouso adaptativos compostos de articulações de pernas controladas para robôs aéreos e outros veículos voadores.
Os pesquisadores disseram que a plataforma, que combina os regimes de locomoção de vôo e caminhada usando controle sincronizado de propulsores elétricos distribuídos e um par de pernas multiarticulares, permite os movimentos complexos, como caminhar em slackline ou skate, que são desafiadores para robôs bípedes existentes .


Manobras de locomoção do LEO. Clique para uma imagem maior. (Fonte: Caltech)
Desenvolvido por uma equipe do Centro de Sistemas Autônomos e Tecnologias (CAST) da Caltech, LEO é considerado o primeiro robô que usa pernas multiarticulares e propulsores baseados em hélice para obter um controle preciso sobre seu equilíbrio. A pesquisa foi relatada em um artigo publicado online na Science Robotics.
LEONARDO demonstra movimentos de caminhada com manobras de vôo para superar obstáculos usando controle sincronizado de hélices e articulações de pernas, o que poderia permitir missões e operações robóticas não possíveis para robôs de locomoção monomodais, de acordo com o artigo de pesquisa. Isso significa que os robôs com locomoção multimodal alternam entre os modos de andar e voar, conforme necessário.
“Comparado com um robô terrestre, o LEO pode superar qualquer obstáculo usando a transição entre os modos terrestre e de vôo ou chegar facilmente a um local elevado usando hélices”, comentaram os pesquisadores no artigo. “Além disso, enquanto um robô aéreo pode pairar sobre os alvos, o LEO pode usar sua locomoção terrestre para se aproximar deles para uma inspeção mais próxima. Quando o LEO está em contato com o solo ou caminhando, ele também pode rejeitar grandes perturbações e evitar quedas, mesmo em superfícies extremamente escorregadias, usando o controle sincronizado de suas hélices distribuídas e articulações das pernas, permitindo assim um movimento de caminhada mais robusto e preciso. ”
Aqui estão os detalhes. LEO tem 75 cm de altura ao caminhar e pesa 2.58 kg. Ele consiste em três subsistemas principais: um tronco, um sistema de propulsão da hélice e duas pernas com pés pontiagudos (veja a imagem abaixo). Ele pode operar de forma autônoma graças aos seus computadores e sensores de bordo. A velocidade nominal de caminhada é de 20 cm / s, embora, disseram os pesquisadores, sua velocidade no solo pode aumentar significativamente com o uso de voos intermitentes perto do solo.

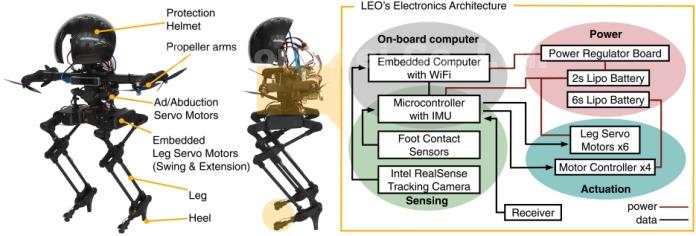
Legenda: Principais componentes eletrônicos e mecânicos da LEO. Clique para uma imagem maior. (Fonte: Caltech)
Cada perna possui três servo motores (motores DC sem escova) para acionamento: um move a estrutura da perna, enquanto os outros dois servo atuadores acionam o mecanismo de perna paralela. Os motores BLDC incorporam caixas de engrenagens de alta redução e controle de posição embutido. “O controlador de posição embutido é preciso e rápido o suficiente para o controle das pernas do LEO devido à baixa inércia das pernas e à grande largura de banda do controlador da hélice que estabiliza a marcha de caminhada”, de acordo com os pesquisadores.
LEO também usa quatro hélices posicionadas simetricamente em seus ombros para estabilizar e controlar as manobras de vôo e de andar. "Os eixos de rotação da hélice são selecionados para permitir a geração de momentos de rotação, inclinação e guinada em ambas as direções positivas e negativas sobre o centro de massa (CoM) para voar e sobre a posição do pé de apoio atual para caminhar", de acordo com o papel.
O torso, que conecta os braços e as pernas em um conjunto, abriga dois computadores de bordo, vários sensores e duas baterias de polímero de lítio (LiPo) para alimentar o sistema. Um computador faz interface com os sensores, recebe comandos, estima os estados com base nas leituras do sensor e calcula as trajetórias. O segundo computador, que opera os controladores de vôo de caminhada e altitude, faz interface diretamente com os atuadores de perna e o controlador do motor da hélice, bem como uma unidade de medição inercial (IMU) para informações de atitude de baixa latência.

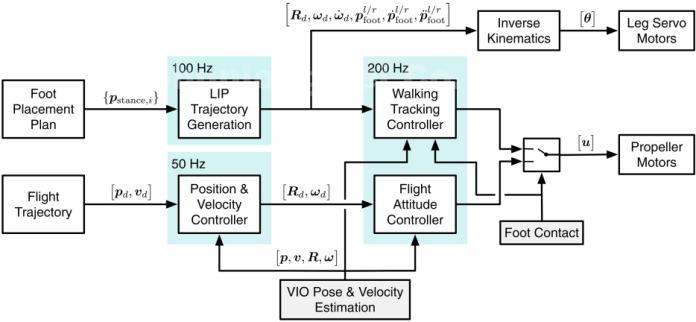
Legenda: Arquitetura de controle do LEO. Clique para uma imagem maior. (Fonte: Caltech)
A equipe Caltech realizou uma série de testes em ambientes externos e internos. Esses testes incluíram caminhar em um terreno plano, andar e andar sincronizados, andar e se equilibrar em uma corda frouxa e andar de skate em torno de cones de trânsito usando o impulso de suas hélices.
Caltech relatou que os pesquisadores planejam criar um design de perna mais rígido que pode suportar mais do peso do robô e aumentar a força de impulso das hélices, bem como tornar o robô mais autônomo. Eles também planejam adicionar um algoritmo de controle de pouso de drones recentemente desenvolvido que usa redes neurais profundas que ajudarão a LEO a ter uma melhor compreensão do ambiente para tomar suas próprias decisões sobre a melhor combinação de andar, voar ou movimento híbrido.
Os co-autores do artigo incluem Soon-Jo Chung, Bren Professor de Aeroespacial e Controle e Sistemas Dinâmicos; Kyunam Kim, pesquisador de pós-doutorado na Caltech; Patrick Spieler, um ex-membro do grupo de Chung que atualmente trabalha no Jet Propulsion Laboratory, administrado pela Caltech para a NASA; Elena-Sorina Lupu (MS '21), estudante de graduação na Caltech, e Alireza Ramezani, ex-bolsista de pós-doutorado na Caltech e atualmente professora assistente na Northeastern University. Esta pesquisa foi apoiada pelo Caltech Gary Clinard Innovation Fund e pelo Caltech's Center for Autonomous Systems and Technologies.