カリフォルニア大学のエンジニア テクノロジー (カリフォルニア工科大学) は、一部が歩行ロボットで一部が飛行ドローンを開発し、「単純な歩行と飛行」を超えた複雑な移動タスクを実行できると報告されています。 LEONARDO (Legs ONboARD drOne、または LEO) 二足歩行ロボットは、マルチモーダル移動ロボット プラットフォームのおかげで、飛行できるだけでなく、スラックラインを歩いたり、ホップしたり、スケートボードに乗ったりすることができます。
このハイブリッド移動機能を活用することで、人間が到達するのが難しい場所での多地点検査、修理、交換作業など、地上または空中ロボットでは困難なさまざまなアプリケーションへの扉を開くことができると研究者は述べています。また、空中ロボットやその他の空飛ぶ車両用の制御された脚関節で構成される適応着陸装置システムの開発を推進しています。
研究者によると、分散型電動スラスターと一対の多関節脚の同期制御を使用して飛行と歩行の移動レジームを組み合わせたプラットフォームは、既存の二足歩行ロボットにとって困難なスラックラインやスケートボードでの歩行などの複雑な動きを可能にします。


レオの移動操作。 クリックすると大きな画像が表示されます。 (出典:カリフォルニア工科大学)
カリフォルニア工科大学の自律システム技術センター(CAST)のチームによって開発された、LEOは、多関節脚とプロペラベースのスラスターを使用してバランスを正確に制御する最初のロボットであると言われています。 この研究は、ScienceRoboticsでオンラインで公開された論文で報告されました。
研究論文によると、LEONARDOは、プロペラと脚の関節の同期制御を使用して障害物を克服するための飛行操作による歩行動作を示しています。これにより、シングルモーダル移動ロボットでは不可能なロボットミッションと操作が可能になる可能性があります。 これは、マルチモーダル移動を備えたロボットが、必要に応じて歩行モードと飛行モードを切り替えることを意味します。
「地上ロボットと比較して、LEOは地上モードと飛行モードの間の移行を使用して障害を克服したり、プロペラを使用して高所に簡単に到達したりできます」と論文の研究者はコメントしています。 「さらに、空中ロボットはターゲットの上にホバリングできますが、LEOは地上移動を使用してターゲットに近づき、詳細な検査を行うことができます。 LEOが地面に接触しているときや歩行しているときは、分散型プロペラと脚の関節を同期制御することで、大きな外乱を排除し、非常に滑りやすい路面でも落下を防ぐことができるため、より堅牢で正確な歩行動作が可能になります。」
詳細はこちらです。 LEOの歩行時の身長は75cm、体重は2.58kgです。 これは、胴体、プロペラ推進システム、およびポイントフィート付きの20本の脚のXNUMXつの主要なサブシステムで構成されています(下の画像を参照)。 搭載されたコンピューターとセンサーのおかげで自律的に動作することができます。 名目上の歩行速度はXNUMXcm / sですが、研究者によると、対地速度は、地面に近づいた状態で断続的な飛行を使用することで大幅に増加する可能性があります。

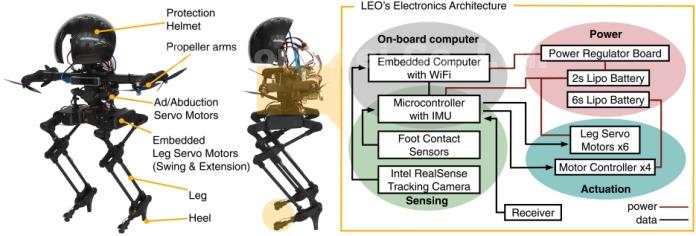
キャプション:LEOの主要な電子機器および機械部品。 クリックすると大きな画像が表示されます。 (出典:カリフォルニア工科大学)
各脚には、作動用のXNUMXつのサーボモーター(ブラシレスDCモーター)があります。XNUMXつは脚構造を動かし、他のXNUMXつのサーボアクチュエーターは平行脚機構を駆動します。 BLDCモーターには、高減速ギアボックスと組み込みの位置制御が組み込まれています。 「埋め込まれた位置コントローラーは、脚の慣性が低く、歩行歩行を安定させるプロペラコントローラーの帯域幅が広いため、LEOの脚制御に十分な精度と速度を備えています」と研究者は述べています。
LEOはまた、肩に対称的に配置されたXNUMXつのプロペラを使用して、歩行と飛行の操作を安定させ、制御します。 「プロペラの回転軸は、飛行の重心(CoM)と歩行の現在の立脚の位置を中心に、正と負の両方向にロール、ピッチ、ヨーのモーメントを生成できるように選択されています。」論文。
腕と脚をXNUMXつのアセンブリに接続する胴体には、XNUMXつのオンボードコンピューター、複数のセンサー、およびシステムに電力を供給するためのXNUMXつのリチウムポリマー(LiPo)バッテリーが収納されています。 XNUMX台のコンピューターがセンサーとインターフェースし、コマンドを受信し、センサーの読み取り値に基づいて状態を推定し、軌道を計算します。 歩行および高度飛行コントローラーを実行するXNUMX番目のコンピューターは、レッグアクチュエーター、プロペラモーターコントローラー、および低遅延姿勢情報用の慣性測定ユニット(IMU)と直接インターフェースします。

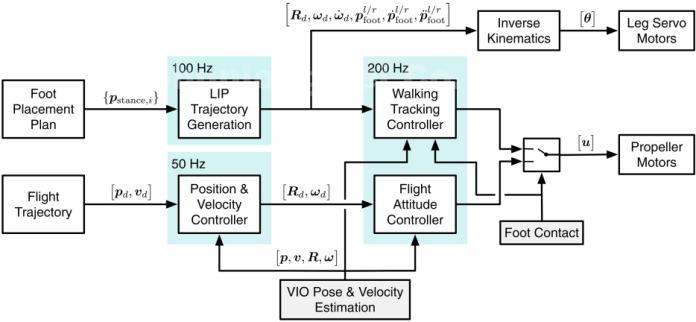
キャプション:LEOの制御アーキテクチャ。 クリックすると大きな画像が表示されます。 (出典:カリフォルニア工科大学)
カリフォルニア工科大学のチームは、屋外と屋内の両方で多くのテストを実施しました。 これらのテストには、平坦な地形での歩行、飛行と歩行の同期、たるんだロープでの歩行とバランス調整、プロペラの推力を使用したトラフィックコーンの周りでのスケートボードの乗車が含まれていました。
カリフォルニア工科大学は、研究者がロボットの重量をより多く支え、プロペラの推力を増加させ、ロボットをより自律的にすることができる、より剛性の高い脚の設計を作成することを計画していると報告しました。 また、LEOが環境をよりよく理解し、歩行、飛行、またはハイブリッドモーションの最適な組み合わせについて独自の決定を下すのに役立つ、ディープニューラルネットワークを使用する新開発のドローン着陸制御アルゴリズムを追加する予定です。
この論文の共著者には、航空宇宙および制御および動的システムのブレン教授であるSoon-JoChungが含まれます。 カリフォルニア工科大学のポスドク研究員、キュナム・キム。 カリフォルニア工科大学がNASAのために管理している、現在ジェット推進研究所に所属しているチョン氏のグループの元メンバーであるパトリック・シュピーラー。 Elena-Sorina Lupu(MS '21)、カリフォルニア工科大学の大学院生、およびAlireza Ramezani、元カリフォルニア工科大学のポスドク研究員であり、現在はノースイースタン大学の助教授。 この研究は、Caltech Gary Clinard InnovationFundとCaltech'sCenter for Autonomous Systems andTechnologiesによってサポートされました。