Ingénieurs du California Institute of Technologie (Caltech) ont créé un robot en partie marchant et en partie un drone volant qui serait capable d'effectuer des tâches de locomotion complexes au-delà de la « simple marche et vol ». Le robot bipède LEONARDO (Legs ONboARD drOne, ou LEO) peut marcher sur une slackline, sauter et faire du skateboard ainsi que voler grâce à sa plateforme robotique de locomotion multimodale.
En tirant parti de cette capacité de locomotion hybride, ont déclaré les chercheurs, cela pourrait ouvrir la porte à une gamme d'applications difficiles pour les robots terrestres ou aériens, telles que les tâches d'inspection, de réparation ou de remplacement multipoint dans des endroits difficiles d'accès pour les humains. ainsi que de conduire le développement de systèmes de trains d'atterrissage adaptatifs composés d'articulations de jambes contrôlées pour les robots aériens et autres véhicules volants.
Les chercheurs ont déclaré que la plate-forme, qui combine des régimes de locomotion de vol et de marche utilisant le contrôle synchronisé de propulseurs électriques distribués et une paire de jambes multi-articulaires, permet les mouvements complexes, tels que la marche sur une slackline ou la planche à roulettes, qui sont difficiles pour les robots bipèdes existants .


Les manœuvres de locomotion de LEO. Cliquer pour agrandir l'image. (Source : Caltech)
Développé par une équipe du Center for Autonomous Systems and Technologies (CAST) de Caltech, LEO serait le premier robot à utiliser des jambes multi-articulaires et des propulseurs à hélice pour obtenir un contrôle précis de son équilibre. La recherche a été rapportée dans un article publié en ligne sur Science Robotics.
LEONARDO démontre des mouvements de marche avec des manœuvres de vol pour surmonter les obstacles en utilisant le contrôle synchronisé des hélices et des articulations des jambes, ce qui pourrait potentiellement permettre des missions robotiques et des opérations impossibles pour les robots de locomotion monomodaux, selon le document de recherche. Cela signifie que les robots à locomotion multimodale basculent entre les modes marche et vol selon les besoins.
"Comparé à un robot au sol, LEO peut surmonter n'importe quel obstacle en utilisant la transition entre ses modes sol et vol ou atteindre facilement un emplacement surélevé à l'aide d'hélices", ont commenté les chercheurs dans le document. « De plus, alors qu'un robot aérien peut survoler des cibles, LEO peut utiliser sa locomotion au sol pour s'en approcher pour une inspection plus approfondie. Lorsque LEO est en contact avec le sol ou en marche, il peut également rejeter les perturbations importantes et empêcher les chutes même sur des surfaces extrêmement glissantes en utilisant un contrôle synchronisé de ses hélices réparties et des articulations des jambes, permettant ainsi un mouvement de marche plus robuste et plus précis.
Voici les détails. LEO mesure 75 cm à la marche et pèse 2.58 kg. Il se compose de trois sous-systèmes principaux : un torse, un système de propulsion à hélice et deux jambes avec des pieds pointus (voir image ci-dessous). Il peut fonctionner de manière autonome grâce à ses ordinateurs de bord et ses capteurs. La vitesse de marche nominale est de 20 cm/s, bien que, selon les chercheurs, sa vitesse au sol puisse augmenter considérablement en utilisant des vols intermittents tout près du sol.

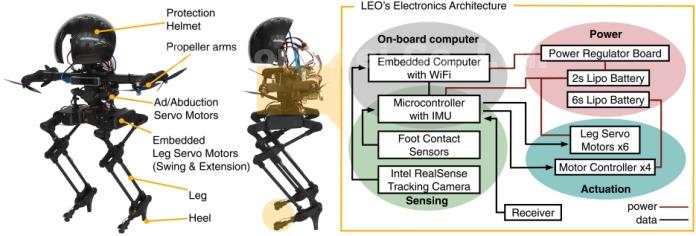
Légende : Principaux composants électroniques et mécaniques de LEO. Cliquer pour agrandir l'image. (Source : Caltech)
Chaque pied a trois servomoteurs (moteurs à courant continu sans balais) pour l'actionnement : l'un déplace la structure du pied, tandis que les deux autres servomoteurs entraînent le mécanisme des pieds parallèles. Les moteurs BLDC intègrent des réducteurs à haute réduction et un contrôle de position intégré. "Le contrôleur de position intégré est suffisamment précis et rapide pour le contrôle des jambes de LEO en raison de la faible inertie des jambes et de la bande passante élevée du contrôleur d'hélice qui stabilise la démarche de marche", selon les chercheurs.
LEO utilise également quatre hélices placées symétriquement à ses épaules pour stabiliser et contrôler les manœuvres de marche et de vol. "Les axes de rotation de l'hélice sont sélectionnés pour permettre la génération de moments de roulis, de tangage et de lacet dans les directions positives et négatives autour du centre de masse (CoM) pour le vol et autour de l'emplacement actuel du pied d'appui pour la marche", selon le papier.
Le torse, qui relie les bras et les jambes en un seul assemblage, abrite deux ordinateurs de bord, plusieurs capteurs et deux batteries lithium-polymère (LiPo) pour alimenter le système. Un ordinateur s'interface avec les capteurs, reçoit des commandes, estime les états sur la base des lectures des capteurs et calcule les trajectoires. Le deuxième ordinateur, qui exécute les contrôleurs de marche et de vol d'altitude, s'interface directement avec les actionneurs de jambe et le contrôleur de moteur d'hélice ainsi qu'une unité de mesure inertielle (IMU) pour les informations d'attitude à faible latence.

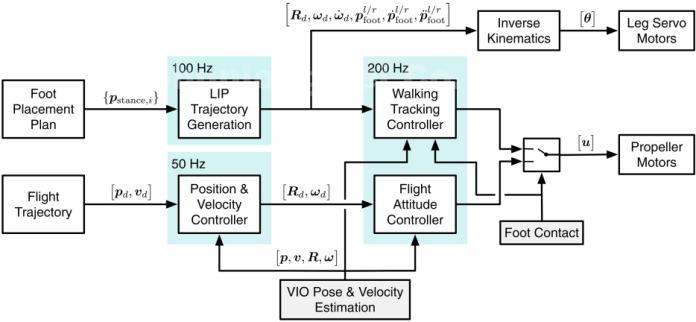
Légende : Architecture de contrôle de LEO. Cliquer pour agrandir l'image. (Source : Caltech)
L'équipe Caltech a effectué un certain nombre de tests à la fois à l'extérieur et à l'intérieur. Ces tests comprenaient la marche sur un terrain plat, le vol et la marche synchronisés, la marche et l'équilibre sur une corde lâche et la conduite d'une planche à roulettes autour des cônes de circulation en utilisant la poussée de ses hélices.
Caltech a rapporté que les chercheurs prévoyaient de créer une conception de jambe plus rigide qui puisse supporter une plus grande partie du poids du robot et augmenter la force de poussée des hélices ainsi que rendre le robot plus autonome. Ils prévoient également d'ajouter un algorithme de contrôle d'atterrissage de drone nouvellement développé qui utilise des réseaux de neurones profonds qui aideront LEO à mieux comprendre l'environnement pour prendre ses propres décisions sur la meilleure combinaison de marche, de vol ou de mouvement hybride.
Les co-auteurs de l'article incluent Soon-Jo Chung, professeur Bren d'aérospatiale et de contrôle et de systèmes dynamiques; Kyunam Kim, chercheur postdoctoral à Caltech ; Patrick Spieler, ancien membre du groupe de Chung qui travaille actuellement au Jet Propulsion Laboratory, géré par Caltech pour la NASA ; Elena-Sorina Lupu (MS '21), étudiante diplômée à Caltech, et Alireza Ramezani, ancienne chercheuse postdoctorale Caltech et actuellement professeure adjointe à la Northeastern University. Cette recherche a été soutenue par le Fonds d'innovation Caltech Gary Clinard et le Centre pour les systèmes et technologies autonomes de Caltech.