Kaliforniya Enstitüsü'ndeki mühendisler Teknoloji (Caltech), "basit yürüme ve uçmanın" ötesinde karmaşık hareket görevlerini yerine getirebildiği bildirilen kısmen yürüyen robot ve kısmen uçan bir drone yarattı. LEONARDO (Legs ONBoARD drOne veya LEO) iki ayaklı robot, çok modlu hareket edebilen robotik platformu sayesinde gevşek halatta yürüyebilir, zıplayabilir ve kaykaya binebilir ve uçabilir.
Araştırmacılar, bu hibrit hareket yeteneğinden yararlanarak, insanların ulaşması zor yerlerdeki çok noktalı inceleme, onarım veya değiştirme görevleri gibi kara veya hava robotları için zor olan bir dizi uygulamanın kapısını açabileceğini söyledi. hava robotları ve diğer uçan araçlar için kontrollü bacak eklemlerinden oluşan uyarlanabilir iniş takımı sistemlerinin geliştirilmesine yön vermenin yanı sıra.
Araştırmacılar, dağıtılmış elektrikli iticilerin ve bir çift çok mafsallı bacağın senkronize kontrolünü kullanarak uçma ve yürüme hareket rejimlerini birleştiren platformun, mevcut iki ayaklı robotlar için zorlayıcı olan gevşek halatta yürüme veya kaykay yapma gibi karmaşık hareketleri mümkün kıldığını söyledi. .


LEO'nun hareket manevraları. Daha büyük bir resim için tıklayın. (Kaynak: Caltech)
Caltech'in Otonom Sistemler ve Teknolojiler Merkezi'ndeki (CAST) bir ekip tarafından geliştirilen LEO'nun, dengesi üzerinde hassas kontrol sağlamak için çok eklemli bacaklar ve pervane tabanlı iticiler kullanan ilk robot olduğu söyleniyor. Araştırma, Science Robotics'te çevrimiçi olarak yayınlanan bir makalede bildirildi.
Araştırma makalesine göre LEONARDO, pervanelerin ve bacak eklemlerinin senkronize kontrolünü kullanarak engellerin üstesinden gelmek için uçuş manevraları ile yürüme hareketlerini gösteriyor; bu da, araştırma makalesine göre tek modlu hareket robotları için mümkün olmayan robotik görevleri ve operasyonları potansiyel olarak mümkün kılabilir. Bu, çok modlu hareket kabiliyetine sahip robotların gerektiğinde yürüme ve uçma modları arasında geçiş yapması anlamına gelir.
Makaledeki araştırmacılar, "Yer robotuyla karşılaştırıldığında LEO, yer ve uçuş modları arasındaki geçişi kullanarak her türlü engeli aşabilir veya pervaneleri kullanarak yüksek bir konuma kolayca ulaşabilir" yorumunu yaptı. "Ayrıca, bir hava robotu hedeflerin üzerinde gezinebilirken, LEO daha yakından incelemek amacıyla yer hareketini kullanarak onlara yaklaşabilir. LEO yerle temas halindeyken veya yürürken, dağıtılmış pervaneleri ve bacak eklemlerinin senkronize kontrolünü kullanarak büyük sarsıntıları da önleyebilir ve son derece kaygan yüzeylerde bile düşmeyi önleyebilir, böylece daha sağlam ve hassas yürüme hareketine olanak tanır."
Detaylar burada. LEO'nun yürürken boyu 75 cm, ağırlığı ise 2.58 kg'dır. Üç ana alt sistemden oluşur: bir gövde, bir pervane tahrik sistemi ve sivri ayaklı iki bacak (aşağıdaki resme bakın). Üzerinde bulunan bilgisayar ve sensörler sayesinde otonom olarak çalışabilmektedir. Nominal yürüme hızı 20 cm/s olsa da araştırmacılar, yere yakın aralıklı uçuş kullanıldığında yer hızının önemli ölçüde artabileceğini söyledi.

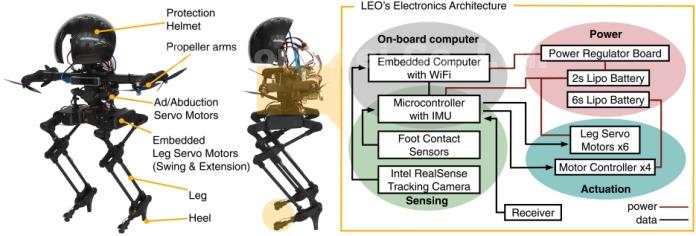
Altyazı: LEO'nun ana elektronik ve mekanik bileşenleri. Daha büyük bir resim için tıklayın. (Kaynak: Caltech)
Her bacakta çalıştırma için üç servo motor (fırçasız DC motorlar) bulunur: biri bacak yapısını hareket ettirirken diğer iki servo aktüatör paralel bacak mekanizmasını çalıştırır. BLDC motorlar, yüksek redüksiyon dişli kutularına ve yerleşik konum kontrolüne sahiptir. Araştırmacılara göre "Yerleşik konum kontrolörü, bacakların düşük ataleti ve yürüme yürüyüşünü stabilize eden pervane kontrol cihazının yüksek bant genişliği nedeniyle LEO'nun bacak kontrolü için yeterince hassas ve hızlıdır."
LEO ayrıca yürüme ve uçma manevralarını dengelemek ve kontrol etmek için omuzlarında simetrik olarak yerleştirilmiş dört pervane kullanır. "Pervanenin dönme eksenleri, uçmak için kütle merkezi (CoM) ve yürüme için mevcut duruş ayağı konumu etrafında hem pozitif hem de negatif yönlerde yuvarlanma, yunuslama ve sapma momentlerinin oluşturulmasını sağlayacak şekilde seçilmiştir." kağıt.
Kolları ve bacakları tek bir düzenekte birleştiren gövde, sisteme güç sağlamak için iki yerleşik bilgisayarı, çoklu sensörleri ve iki lityum polimer (LiPo) pili barındırıyor. Bir bilgisayar sensörlerle arayüz oluşturur, komutları alır, sensör okumalarına dayalı olarak durumları tahmin eder ve yörüngeleri hesaplar. Yürüyen ve irtifa uçuş kontrol cihazlarını çalıştıran ikinci bilgisayar, düşük gecikmeli durum bilgisi için eylemsizlik ölçüm ünitesinin (IMU) yanı sıra bacak aktüatörleri ve pervane motoru kontrol cihazıyla doğrudan arayüz oluşturur.

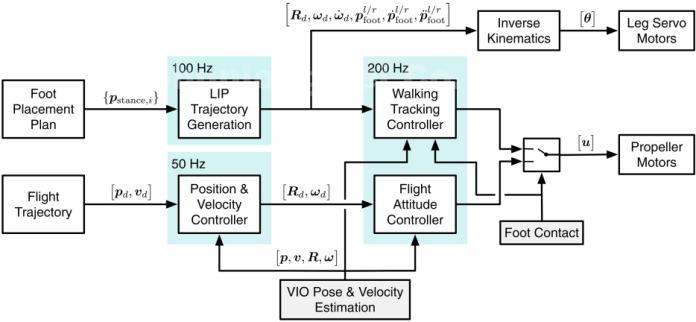
Başlık: LEO'nun kontrol mimarisi. Daha büyük bir resim için tıklayın. (Kaynak: Caltech)
Caltech ekibi hem açık havada hem de kapalı alanda bir dizi test gerçekleştirdi. Bu testler, düz bir arazide yürümeyi, senkronize uçmayı ve yürümeyi, gevşek bir ip üzerinde yürümeyi ve dengelemeyi ve pervanelerinin itme kuvvetini kullanarak trafik konileri etrafında kaykay sürmeyi içeriyordu.
Caltech, araştırmacıların robotun ağırlığının daha fazlasını destekleyebilecek, pervanelerin itme kuvvetini artırabilecek ve robotu daha otonom hale getirebilecek daha sert bir bacak tasarımı oluşturmayı planladıklarını bildirdi. Ayrıca, LEO'nun çevreyi daha iyi anlayarak yürüme, uçma veya hibrit hareketin en iyi kombinasyonu hakkında kendi kararlarını vermesine yardımcı olacak derin sinir ağlarını kullanan yeni geliştirilmiş bir drone iniş kontrol algoritmasını da eklemeyi planlıyorlar.
Makalenin ortak yazarları arasında Bren Havacılık, Kontrol ve Dinamik Sistemler Profesörü Soon-Jo Chung; Kyunam Kim, Caltech'te doktora sonrası araştırmacı; Chung grubunun eski bir üyesi olan ve şu anda NASA için Caltech tarafından yönetilen Jet Propulsion Laboratuvarı'nda çalışan Patrick Spieler; Caltech'te yüksek lisans öğrencisi Elena-Sorina Lupu (MS '21) ve eski Caltech doktora sonrası araştırmacısı ve şu anda Northeastern Üniversitesi'nde yardımcı doçent olan Alireza Ramezani. Bu araştırma Caltech Gary Clinard İnovasyon Fonu ve Caltech Otonom Sistemler ve Teknolojiler Merkezi tarafından desteklenmiştir.