Jurutera di California Institute of Teknologi (Caltech) telah mencipta sebahagian robot berjalan dan sebahagian dron terbang yang dilaporkan boleh melakukan tugas pergerakan yang kompleks melangkaui "berjalan dan terbang mudah." Robot bipedal LEONARDO (Legs ONboARD drOne, atau LEO) boleh berjalan secara slackline, melompat dan menunggang papan selaju serta terbang berkat platform robotik pergerakan multimodalnya.
Dengan memanfaatkan kemampuan gerak hibrid ini, para penyelidik mengatakan, ia dapat membuka pintu ke berbagai aplikasi yang sukar untuk robot darat atau udara, seperti tugas pemeriksaan, pembaikan, atau penggantian pelbagai titik di lokasi yang sukar dijangkau oleh manusia serta mendorong pengembangan sistem gear pendaratan adaptif yang terdiri daripada sendi kaki terkawal untuk robot udara dan kenderaan terbang lain.
Para penyelidik mengatakan bahawa platform, yang menggabungkan rejim pergerakan dan berjalan dengan menggunakan penyegerakan pendorong elektrik yang diedarkan dan sepasang kaki multi-sendi, memungkinkan pergerakan yang kompleks, seperti berjalan di slackline atau skateboard, yang mencabar robot bipedal yang ada .


Manuver pergerakan LEO. Klik untuk gambar yang lebih besar. (Sumber: Caltech)
Dibangunkan oleh pasukan di Caltech's Center for Autonomous Systems and Technologies (CAST), LEO dikatakan robot pertama yang menggunakan kaki berbilang sendi dan pendorong berasaskan baling-baling untuk mencapai kawalan ketepatan terhadap keseimbangannya. Penyelidikan ini dilaporkan dalam makalah yang diterbitkan dalam talian di Science Robotics.
LEONARDO menunjukkan gerakan berjalan dengan manuver terbang untuk mengatasi rintangan menggunakan kawalan diselaraskan baling-baling dan sendi kaki, yang berpotensi memungkinkan misi dan operasi robot tidak mungkin dilakukan untuk robot pergerakan tunggal, menurut makalah penyelidikan. Ini bermaksud robot dengan pertukaran lokomosi multimodal antara mod berjalan dan terbang mengikut keperluan.
"Berbanding dengan robot darat, LEO dapat mengatasi segala rintangan menggunakan peralihan antara moda darat dan terbangnya atau dengan mudah mencapai lokasi yang tinggi dengan menggunakan baling-baling," komentar para penyelidik dalam makalah tersebut. "Selain itu, sementara robot udara dapat mengarahkan sasaran, LEO dapat menggunakan gerakan darat untuk mendekati mereka untuk diperiksa lebih dekat. Ketika LEO bersentuhan dengan tanah atau berjalan, ia juga dapat menolak gangguan besar dan mencegah terjatuh walaupun pada permukaan yang sangat licin dengan menggunakan kawalan diselaraskan pada baling-baling dan sendi kaki yang tersebar, sehingga memungkinkan pergerakan berjalan yang lebih kuat dan tepat. "
Berikut adalah perinciannya. LEO mempunyai ketinggian 75 cm ketika berjalan dan berat 2.58 kg. Ia terdiri daripada tiga subsistem utama: batang tubuh, sistem pendorong baling-baling, dan dua kaki dengan kaki titik (lihat gambar di bawah). Ia boleh beroperasi secara autonomi berkat komputer dan sensornya. Kelajuan berjalan nominal adalah 20 cm / s, bagaimanapun, para penyelidik mengatakan, kelajuan darat dapat meningkat dengan ketara dengan menggunakan penerbangan sekejap ketika dekat dengan tanah.

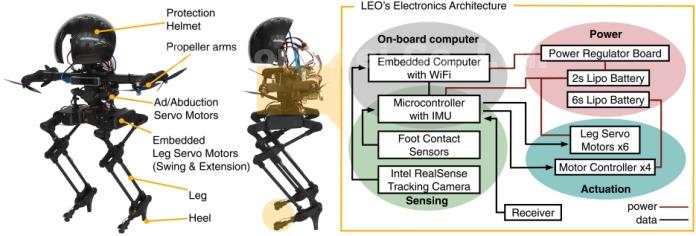
Kapsyen: Komponen elektronik dan mekanikal utama LEO. Klik untuk gambar yang lebih besar. (Sumber: Caltech)
Setiap kaki mempunyai tiga motor servo (motor DC tanpa berus) untuk pengaktifan: satu menggerakkan struktur kaki, sementara dua penggerak servo yang lain menggerakkan mekanisme kaki selari. Motor BLDC menggabungkan kotak gear pengurangan tinggi dan kawalan kedudukan tertanam. "Pengawal kedudukan tertanam tepat dan cukup pantas untuk kawalan kaki LEO kerana inersia kaki yang rendah dan lebar jalur tinggi pengawal baling-baling yang menstabilkan berjalan kaki," menurut para penyelidik.
LEO juga menggunakan empat baling-baling yang diletakkan secara simetris di bahunya untuk menstabilkan dan mengawal manuver berjalan dan terbang. "Kapak putaran baling-baling dipilih untuk memungkinkan penghasilan momen gulungan, nada, dan menguap di arah positif dan negatif mengenai pusat jisim (CoM) untuk terbang dan mengenai kedudukan kaki semasa untuk berjalan," menurut kertas.
Torso, yang menghubungkan lengan dan kaki menjadi satu unit, menempatkan dua komputer di atas kapal, pelbagai sensor, dan dua bateri polimer lithium (LiPo) untuk menghidupkan sistem. Satu komputer berinteraksi dengan sensor, menerima arahan, mengira keadaan berdasarkan pembacaan sensor, dan menghitung lintasan. Komputer kedua, yang menjalankan pengendali penerbangan berjalan dan ketinggian, berhubung terus dengan penggerak kaki dan pengawal motor baling-baling serta unit pengukuran inersia (IMU) untuk maklumat sikap latensi rendah.

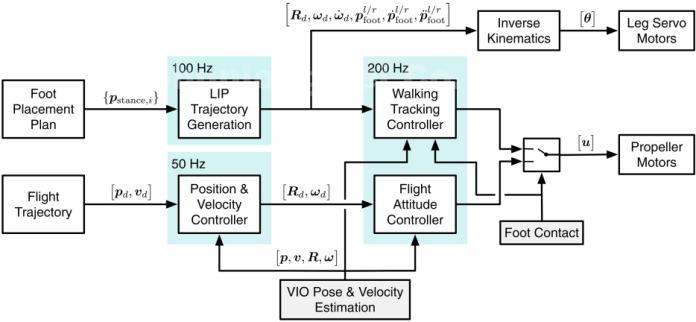
Kapsyen: Mengawal seni bina LEO. Klik untuk gambar yang lebih besar. (Sumber: Caltech)
Pasukan Caltech melakukan sejumlah ujian di luar dan di dalam rumah. Ujian ini merangkumi berjalan di medan yang rata, terbang dan berjalan yang diselaraskan, berjalan dan mengimbangkan pada tali kendur, dan menaiki papan selaju di sekitar kerucut lalu lintas dengan menggunakan tujahan baling-balingnya.
Caltech melaporkan bahawa para penyelidik merancang untuk membuat reka bentuk kaki yang lebih kaku yang dapat menyokong lebih banyak berat robot dan meningkatkan daya tuju baling-baling serta menjadikan robot lebih autonomi. Mereka juga merancang untuk menambahkan algoritma kawalan pendaratan drone yang baru dikembangkan yang menggunakan rangkaian neural mendalam yang akan membantu LEO mempunyai pemahaman yang lebih baik mengenai persekitaran untuk membuat keputusan sendiri mengenai kombinasi gerakan berjalan, terbang, atau hibrida terbaik.
Pengarang bersama makalah tersebut merangkumi Soon-Jo Chung, Profesor Aeroangkasa dan Sistem Kawalan dan Dinamik Bren; Kyunam Kim, penyelidik pasca doktoral di Caltech; Patrick Spieler, bekas anggota kumpulan Chung yang kini bersama Jet Propulsion Laboratory, dikendalikan oleh Caltech untuk NASA; Elena-Sorina Lupu (MS '21), pelajar siswazah di Caltech, dan Alireza Ramezani, bekas sarjana pasca doktoral Caltech dan kini menjadi penolong profesor di Northeastern University. Penyelidikan ini disokong oleh Dana Inovasi Caltech Gary Clinard dan Pusat Sistem dan Teknologi Autonomi Caltech.