วิศวกรจากสถาบันแคลิฟอร์เนีย เทคโนโลยี (Caltech) ได้สร้างหุ่นยนต์เดินได้ส่วนหนึ่งและโดรนบินได้ซึ่งมีรายงานว่าสามารถดำเนินการเคลื่อนไหวที่ซับซ้อนได้ นอกเหนือจาก “การเดินและการบินที่เรียบง่าย” หุ่นยนต์สองเท้า LEONARDO (Legs ONboARD drOne หรือ LEO) สามารถเดินแบบสแล็คไลน์ กระโดด และขี่สเก็ตบอร์ด รวมถึงบินได้ด้วยแพลตฟอร์มหุ่นยนต์เคลื่อนที่หลายรูปแบบ
นักวิจัยกล่าวว่าการใช้ประโยชน์จากความสามารถในการเคลื่อนที่แบบไฮบริดนี้สามารถเปิดประตูสู่การใช้งานที่หลากหลายซึ่งยากสำหรับหุ่นยนต์ภาคพื้นดินหรือทางอากาศ เช่น การตรวจสอบ ซ่อมแซม หรือเปลี่ยนชิ้นส่วนในสถานที่ที่มนุษย์เข้าถึงได้ยาก ตลอดจนขับเคลื่อนการพัฒนาระบบเกียร์ลงจอดแบบปรับได้ซึ่งประกอบด้วยข้อต่อขาควบคุมสำหรับหุ่นยนต์ทางอากาศและยานพาหนะที่บินได้อื่นๆ
นักวิจัยกล่าวว่า แพลตฟอร์มดังกล่าว ซึ่งผสมผสานรูปแบบการบินและการเดินโดยใช้การควบคุมแบบซิงโครไนซ์ของเครื่องขับดันไฟฟ้าแบบกระจายและขาที่มีข้อต่อหลายคู่ ช่วยให้สามารถเคลื่อนไหวที่ซับซ้อนได้ เช่น การเดินบนเส้นสแล็กไลน์หรือสเก็ตบอร์ด ซึ่งเป็นความท้าทายสำหรับหุ่นยนต์สองเท้าที่มีอยู่ .


การซ้อมรบการเคลื่อนที่ของ LEO คลิกเพื่อดูภาพขนาดใหญ่ (ที่มา: คาลเทค)
LEO ได้รับการพัฒนาโดยทีมงานที่ศูนย์ระบบและเทคโนโลยีอิสระ (CAST) ของคาลเทค โดยถือเป็นหุ่นยนต์ตัวแรกที่ใช้ขาแบบหลายข้อต่อและใบพัดแบบใช้ใบพัดเพื่อให้สามารถควบคุมความสมดุลได้อย่างแม่นยำ การวิจัยได้รับการรายงานในบทความที่ตีพิมพ์ออนไลน์ที่ Science Robotics
รายงานการวิจัยระบุว่า LEONARDO สาธิตการเคลื่อนไหวในการเดินด้วยการซ้อมบินเพื่อเอาชนะอุปสรรคโดยใช้การควบคุมใบพัดและข้อต่อขาแบบซิงโครไนซ์ ซึ่งอาจช่วยให้ภารกิจและการทำงานของหุ่นยนต์ไม่สามารถทำได้สำหรับหุ่นยนต์เคลื่อนที่แบบโมดัล ซึ่งหมายความว่าหุ่นยนต์ที่มีการเคลื่อนไหวต่อเนื่องหลายรูปแบบจะสลับไปมาระหว่างโหมดเดินและบินได้ตามต้องการ
"เมื่อเทียบกับหุ่นยนต์ภาคพื้นดิน LEO สามารถเอาชนะอุปสรรคใดๆ โดยใช้การเปลี่ยนแปลงระหว่างโหมดภาคพื้นดินและโหมดการบิน หรือเข้าถึงตำแหน่งที่สูงได้อย่างง่ายดายโดยใช้ใบพัด" นักวิจัยกล่าวในรายงาน “นอกจากนี้ ในขณะที่หุ่นยนต์ทางอากาศสามารถโฉบเหนือเป้าหมายได้ LEO สามารถใช้การเคลื่อนที่ภาคพื้นดินเพื่อเข้าหาพวกมันเพื่อการตรวจสอบอย่างใกล้ชิด เมื่อ LEO สัมผัสกับพื้นหรือเดิน LEO ก็สามารถปฏิเสธสิ่งรบกวนขนาดใหญ่และป้องกันการล้มได้แม้บนพื้นผิวที่ลื่นมากโดยใช้การควบคุมแบบซิงโครไนซ์ของใบพัดแบบกระจายและข้อต่อขา ซึ่งช่วยให้เคลื่อนไหวเดินได้อย่างแข็งแกร่งและแม่นยำยิ่งขึ้น”
นี่คือรายละเอียด LEO มีความสูงขณะเดิน 75 ซม. และหนัก 2.58 กก. ประกอบด้วยสามระบบย่อยหลัก: ลำตัว ระบบขับเคลื่อนใบพัด และสองขาที่มีปลายเท้าชี้ (ดูภาพด้านล่าง) สามารถทำงานได้โดยอัตโนมัติด้วยคอมพิวเตอร์และเซ็นเซอร์ในตัว นักวิจัยกล่าวว่าความเร็วในการเดินปกติคือ 20 ซม./วินาที ความเร็วภาคพื้นดินสามารถเพิ่มขึ้นอย่างมากโดยใช้การบินเป็นช่วงๆ ในขณะที่อยู่ใกล้พื้น

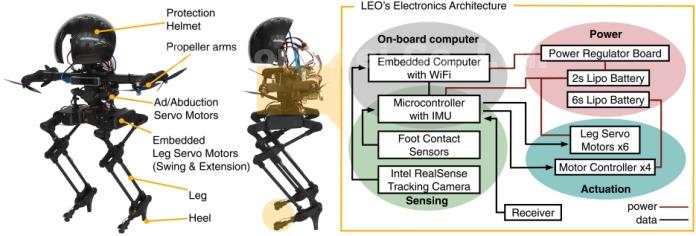
คำบรรยาย: อุปกรณ์อิเล็กทรอนิกส์และส่วนประกอบทางกลหลักของ LEO คลิกเพื่อดูภาพขนาดใหญ่ (ที่มา: คาลเทค)
ขาแต่ละข้างมีเซอร์โวมอเตอร์สามตัว (มอเตอร์กระแสตรงแบบไม่มีแปรงถ่าน) สำหรับการกระตุ้น: ตัวหนึ่งเคลื่อนโครงสร้างขา ในขณะที่อีกสองตัวกระตุ้นเซอร์โวขับเคลื่อนกลไกขาคู่ขนาน มอเตอร์ BLDC รวมกระปุกเกียร์ลดสูงและการควบคุมตำแหน่งในตัว นักวิจัยกล่าวว่า "ตัวควบคุมตำแหน่งแบบฝังนั้นแม่นยำและเร็วเพียงพอสำหรับการควบคุมขาของ LEO เนื่องจากความเฉื่อยของขาที่ต่ำและแบนด์วิธสูงของตัวควบคุมใบพัดที่ทำให้การเดินมีเสถียรภาพ"
LEO ยังใช้ใบพัดที่วางสมมาตรสี่ตัวที่ไหล่ของมันเพื่อให้มีเสถียรภาพและควบคุมการเคลื่อนที่ในการเดินและการบิน “แกนหมุนของใบพัดถูกเลือกเพื่อให้สามารถสร้างโมเมนต์การหมุน ระยะพิทช์ และการหันเหทั้งในทิศทางบวกและลบที่เกี่ยวกับจุดศูนย์กลางมวล (CoM) สำหรับการบินและเกี่ยวกับตำแหน่งขาตั้งปัจจุบันสำหรับการเดิน” ตาม กระดาษ.
ลำตัวซึ่งเชื่อมต่อแขนและขาเป็นชุดเดียว ประกอบด้วยคอมพิวเตอร์ออนบอร์ด XNUMX เครื่อง เซ็นเซอร์หลายตัว และแบตเตอรี่ลิเธียมโพลิเมอร์ (LiPo) XNUMX ก้อนสำหรับจ่ายไฟให้กับระบบ คอมพิวเตอร์เครื่องหนึ่งเชื่อมต่อกับเซ็นเซอร์ รับคำสั่ง ประเมินสถานะตามการอ่านของเซ็นเซอร์ และคำนวณวิถี คอมพิวเตอร์เครื่องที่สองซึ่งใช้ตัวควบคุมการเดินและการบินในระดับความสูง จะเชื่อมต่อโดยตรงกับตัวกระตุ้นขาและตัวควบคุมมอเตอร์ใบพัด รวมถึงหน่วยวัดแรงเฉื่อย (IMU) สำหรับข้อมูลทัศนคติที่มีเวลาแฝงต่ำ

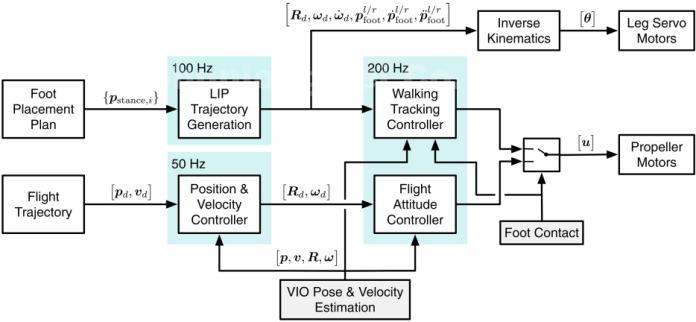
คำบรรยายภาพ: สถาปัตยกรรมการควบคุมของ LEO คลิกเพื่อดูภาพขนาดใหญ่ (ที่มา: คาลเทค)
ทีมงานของ Caltech ได้ทำการทดสอบทั้งภายนอกและภายในอาคาร การทดสอบเหล่านี้รวมถึงการเดินบนพื้นราบ การบินและการเดินแบบซิงโครไนซ์ การเดินและการทรงตัวบนเชือกหย่อน และการขี่สเก็ตบอร์ดรอบกรวยจราจรโดยใช้แรงผลักของใบพัด
Caltech รายงานว่านักวิจัยวางแผนที่จะสร้างการออกแบบขาที่แข็งแรงขึ้นซึ่งสามารถรองรับน้ำหนักของหุ่นยนต์ได้มากขึ้นและเพิ่มแรงผลักของใบพัดรวมทั้งทำให้หุ่นยนต์มีอิสระมากขึ้น พวกเขายังวางแผนที่จะเพิ่มอัลกอริธึมการควบคุมการลงจอดด้วยโดรนที่พัฒนาขึ้นใหม่ซึ่งใช้โครงข่ายประสาทเทียมเชิงลึก ที่จะช่วยให้ LEO มีความเข้าใจที่ดีขึ้นเกี่ยวกับสิ่งแวดล้อมในการตัดสินใจของตนเองเกี่ยวกับการผสมผสานที่ดีที่สุดของการเดิน การบิน หรือการเคลื่อนไหวแบบไฮบริด
ผู้ร่วมเขียนบทความ ได้แก่ Soon-Jo Chung, Bren Professor of Aerospace and Control and Dynamical Systems; Kyunam Kim นักวิจัยหลังปริญญาเอกที่ Caltech; Patrick Spieler อดีตสมาชิกของกลุ่ม Chung ซึ่งปัจจุบันทำงานอยู่ใน Jet Propulsion Laboratory ซึ่งบริหารงานโดย Caltech สำหรับ NASA; Elena-Sorina Lupu (MS '21) นักศึกษาระดับบัณฑิตศึกษาที่ Caltech และ Alireza Ramezani อดีตนักวิชาการหลังปริญญาเอกของ Caltech และปัจจุบันเป็นผู้ช่วยศาสตราจารย์ที่ Northeastern University งานวิจัยนี้ได้รับการสนับสนุนโดยกองทุนนวัตกรรม Caltech Gary Clinard และศูนย์ระบบและเทคโนโลยีอิสระของ Caltech