מהנדסים במכון קליפורניה של טכנולוגיה (Caltech) יצרו בחלקו רובוט מהלך ובחלקו מזל"ט מעופף, שעל פי הדיווחים יכולים לבצע משימות תנועה מורכבות מעבר ל"הליכה וטיסה פשוטה". הרובוט הדו-פדאלי LEONARDO (Legs ONboARD drOne, או LEO) יכול ללכת על ליין slackline, לקפוץ ולרכוב על סקייטבורד כמו גם לעוף הודות לפלטפורמה הרובוטית התנועה הרב-מודאלית שלו.
על ידי ניצול יכולת התנועה ההיברידית הזו, אמרו החוקרים, היא עלולה לפתוח את הדלת למגוון יישומים שקשה לרובוטים קרקעיים או אוויריים, כגון בדיקות, תיקונים או החלפות מרובות נקודות במקומות שקשה לבני אדם להגיע אליהם. כמו גם להניע את הפיתוח של מערכות ציוד נחיתה אדפטיביות המורכבות ממפרקי רגליים נשלטים עבור רובוטים אוויריים וכלי רכב מעופפים אחרים.
החוקרים אמרו כי הפלטפורמה, המשלבת משטרי תנועה והליכה תוך שימוש בשליטה מסונכרנת על דחפים חשמליים מבוזרים וזוג רגליים מרובות מפרקים, מאפשרת את התנועות המורכבות, כגון הליכה על קו רפוי או סקייטבורד, שהן מאתגרות עבור רובוטים דו-מימדיים קיימים. .


תמרוני התנועה של LEO. לחץ לתמונה גדולה יותר. (מקור: Caltech)
LEO, שפותחה על ידי צוות במרכז מערכות טכנולוגיות וטכנולוגיות אוטונומיות (CAST) של Caltech, נאמר כי הוא הרובוט הראשון שמשתמש ברגליים מרובות מפרקים ובדחפים מבוססי מדחפים כדי להשיג שליטה מדויקת על שיווי המשקל שלו. המחקר דווח במאמר שפורסם באינטרנט ב- Science Robotics.
LEONARDO מדגים תנועות הליכה עם תמרונים מעופפים כדי להתגבר על מכשולים באמצעות שליטה מסונכרנת על מדחפים ומפרקי רגליים, שעלולים לאפשר משימות ופעולות רובוטיות שאינן אפשריות עבור רובוטים חד-מודליים, על פי נייר המחקר. המשמעות היא שרובוטים עם תנועה רב -מודאלית עוברים בין מצבי הליכה וטיסה לפי הצורך.
"בהשוואה לרובוט קרקע, LEO יכול להתגבר על כל מכשול באמצעות המעבר בין מצבי הקרקע והמעוף שלו או להגיע בקלות למיקום גבוה באמצעות מדחפים", ציינו החוקרים בעיתון. "בנוסף, בעוד שרובוט אווירי יכול לרחף מעל מטרות, LEO יכול להשתמש בתנועת הקרקע שלו כדי להתקרב אליהם לבדיקה מקרוב. כאשר LEO נמצא במגע קרקע או הולך, הוא יכול גם לדחות הפרעות גדולות ולמנוע נפילה אפילו על משטחים חלקלקים במיוחד על ידי שימוש בשליטה מסונכרנת על המדחפים המפרקים ומפרקי הרגליים, ובכך לאפשר תנועת הליכה חזקה ומדויקת יותר. "
הנה הפרטים. לגובה LEO 75 ס"מ בהליכה ומשקלו 2.58 ק"ג. הוא מורכב משלוש מערכות משנה עיקריות: פלג גוף עליון, מערכת הנעה מדחף ושתי רגליים עם רגליים מחודדות (ראו תמונה למטה). הוא יכול לפעול באופן אוטונומי הודות למחשבים ולחיישנים המשולבים בו. אולם מהירות ההליכה הנומינלית היא 20 ס"מ לשנייה, לדברי החוקרים, מהירות הקרקע שלה יכולה לעלות משמעותית על ידי שימוש בטיסה לסירוגין כשהיא קרובה לקרקע.

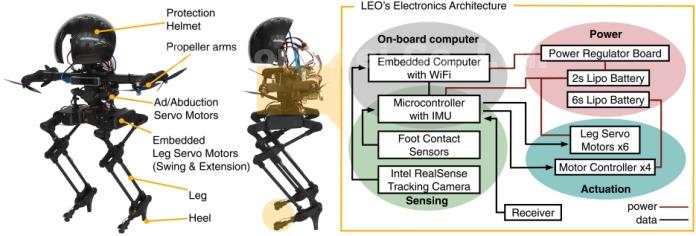
הכיתוב: האלקטרוניקה והרכיבים המכניים העיקריים של LEO. לחץ לתמונה גדולה יותר. (מקור: Caltech)
לכל רגל שלושה מנועי סרוו (מנועי DC ללא מברשת) להפעלה: אחד מניע את מבנה הרגליים, בעוד ששני מפעלי הסרוו האחרים מניעים את מנגנון הרגל המקבילה. מנועי BLDC משלבים תיבות הילוכים בעלות הפחתה גבוהה ובקרת עמדות מוטבעת. "בקר המיקום המשובץ מדויק ומהיר מספיק לשליטה ברגליים של LEO בשל האינרציה הנמוכה של הרגליים ורוחב הפס הגבוה של בקר המדחף המייצב את הליכה ההליכה", לדברי החוקרים.
LEO משתמשת גם בארבעה מדחפים הממוקמים באופן סימטרי על כתפיו לייצוב ושליטה בתמרוני ההליכה והמעוף. "צירי הסיבוב של המדחף נבחרים על מנת לאפשר יצירת רגעי גלילה, זווית ופיהוק לכיוון חיובי ושלילי כאחד על מרכז המסה (CoM) לטיסה ועל המיקום הנוכחי של כף הרגל להליכה", על פי עיתון.
פלג הגוף העליון, המחבר את הידיים והרגליים למכלול אחד, מכיל שני מחשבים משולבים, חיישנים מרובים ושתי סוללות ליתיום פולימר (LiPo) להפעלת המערכת. מחשב אחד מתממשק עם החיישנים, מקבל פקודות, מעריך מצבים המבוססים על קריאות החיישנים ומחשב את המסלולים. המחשב השני, המפעיל את בקרי הטיסה והגובה, מתממשק ישירות עם מפעלי הרגליים ובקר המנוע של המדחף, כמו גם יחידת מדידה אינרציאלית (IMU) למידע על יחס בעל חביון נמוך.

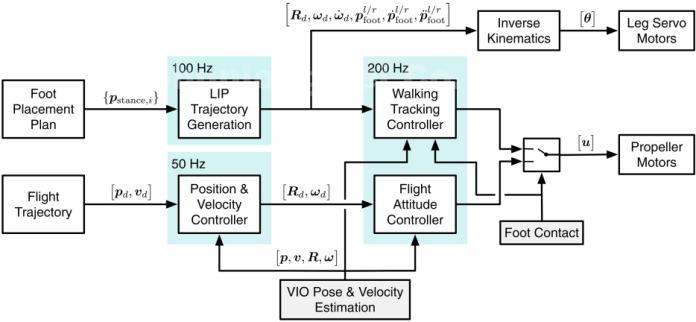
הכיתוב: ארכיטקטורת השליטה של LEO. לחץ לתמונה גדולה יותר. (מקור: Caltech)
צוות Caltech ביצע מספר בדיקות בחוץ ובפנים. בדיקות אלה כללו הליכה על שטח שטוח, טיסה והליכה מסונכרנות, הליכה ואיזון על חבל רפוי, רכיבה על סקייטבורד סביב קונוסי תנועה באמצעות דחף מדחפיו.
Caltech דיווחה כי החוקרים מתכננים ליצור עיצוב רגליים קשיח יותר שיכול לתמוך יותר ממשקל הרובוט ולהגדיל את כוח הדחף של המדחפים, כמו גם להפוך את הרובוט לאוטונומי יותר. הם גם מתכננים להוסיף אלגוריתם חדש לבקרת נחיתת מזל"ט שפותח, העושה שימוש ברשתות עצביות עמוקות שיעזרו ל- LEO להבין טוב יותר את הסביבה כדי לקבל החלטות משלה לגבי השילוב הטוב ביותר בין הליכה, טיסה או תנועה היברידית.
בין מחברי המאמר ניתן למצוא את Soon-Jo Chung, פרופסור ברן לחלל ובקרה ומערכות דינמיות; קיונאם קים, חוקר פוסט -דוקטורט ב- Caltech; פטריק שפילר, חבר לשעבר בקבוצת צ'ונג שנמצא כיום במעבדת הנעה הסילוני, בניהול חברת Caltech עבור נאס"א; אלנה-סורינה לופו (MS '21), סטודנטית לתואר שני בקלטק, ואלירזה רמזאני, בעבר פוקט-דוקטורט בקלטק וכיום פרופסור באוניברסיטה בצפון מזרח. מחקר זה נתמך על ידי קרן החדשנות של Caltech Gary Clinard ומרכז Caltech למערכות וטכנולוגיות אוטונומיות.