Ingenieros del Instituto de California de Tecnología (Caltech) han creado un robot en parte caminante y en parte un dron volador que, según se informa, puede realizar tareas de locomoción complejas más allá de "simplemente caminar y volar". El robot bípedo LEONARDO (Legs ONboARD drOne, o LEO) puede caminar en slackline, saltar y andar en patineta, además de volar gracias a su plataforma robótica de locomoción multimodal.
Al aprovechar esta capacidad de locomoción híbrida, dijeron los investigadores, podría abrir la puerta a una variedad de aplicaciones que son difíciles para los robots terrestres o aéreos, como tareas de inspección, reparación o reemplazo de múltiples puntos en lugares que son difíciles de alcanzar para los humanos. así como impulsar el desarrollo de sistemas de trenes de aterrizaje adaptativos compuestos por articulaciones de piernas controladas para robots aéreos y otros vehículos voladores.
Los investigadores dijeron que la plataforma, que combina regímenes de locomoción de vuelo y caminar utilizando un control sincronizado de propulsores eléctricos distribuidos y un par de patas de articulaciones múltiples, permite los movimientos complejos, como caminar en una línea slackline o andar en patineta, que son un desafío para los robots bípedos existentes. .


Maniobras de locomoción de LEO. Haga clic para una imagen más grande. (Fuente: Caltech)
Desarrollado por un equipo del Centro de Sistemas y Tecnologías Autónomos (CAST) de Caltech, se dice que LEO es el primer robot que utiliza patas de articulaciones múltiples y propulsores basados en hélices para lograr un control de precisión sobre su equilibrio. La investigación se informó en un artículo publicado en línea en Science Robotics.
LEONARDO demuestra movimientos de caminar con maniobras de vuelo para superar obstáculos utilizando el control sincronizado de hélices y articulaciones de las piernas, lo que podría permitir misiones robóticas y operaciones que no son posibles para robots de locomoción monomodal, según el artículo de investigación. Esto significa que los robots con locomoción multimodal cambian entre los modos de caminar y volar según sea necesario.
“En comparación con un robot terrestre, LEO puede superar cualquier obstáculo usando la transición entre sus modos terrestre y de vuelo o alcanzar fácilmente una ubicación elevada usando hélices”, comentaron los investigadores en el documento. “Además, mientras que un robot aéreo puede flotar sobre los objetivos, LEO puede usar su locomoción terrestre para acercarse a ellos para una inspección más cercana. Cuando LEO está en contacto con el suelo o caminando, también puede rechazar grandes perturbaciones y evitar caídas incluso en superficies extremadamente resbaladizas mediante el control sincronizado de sus hélices distribuidas y articulaciones de las piernas, lo que permite un movimiento de marcha más robusto y preciso ".
Aquí están los detalles. LEO tiene una altura de 75 cm al caminar y pesa 2.58 kg. Consta de tres subsistemas principales: un torso, un sistema de propulsión de hélice y dos piernas con pies puntiagudos (ver imagen a continuación). Puede funcionar de forma autónoma gracias a sus ordenadores y sensores integrados. La velocidad nominal al caminar es de 20 cm / s, sin embargo, dijeron los investigadores, su velocidad respecto al suelo puede aumentar significativamente mediante el uso de vuelos intermitentes cerca del suelo.

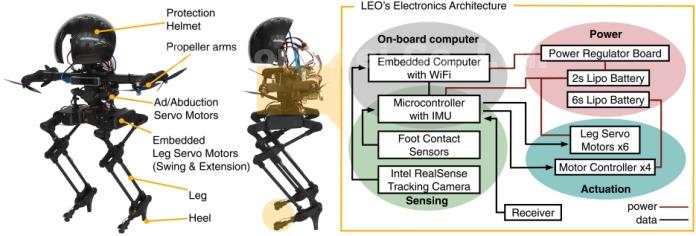
Leyenda: Principales componentes electrónicos y mecánicos de LEO. Haga clic para una imagen más grande. (Fuente: Caltech)
Cada pata tiene tres servomotores (motores de CC sin escobillas) para su accionamiento: uno mueve la estructura de la pata, mientras que los otros dos servoactuadores accionan el mecanismo de pata paralela. Los motores BLDC incorporan cajas de cambios de alta reducción y control de posición integrado. "El controlador de posición integrado es lo suficientemente preciso y rápido para el control de las piernas de LEO debido a la baja inercia de las piernas y al gran ancho de banda del controlador de la hélice que estabiliza la marcha", según los investigadores.
LEO también usa cuatro hélices colocadas simétricamente en sus hombros para estabilizar y controlar las maniobras de caminar y volar. "Los ejes de rotación de la hélice se seleccionan para permitir la generación de momentos de balanceo, cabeceo y guiñada en direcciones positivas y negativas sobre el centro de masa (CoM) para volar y sobre la ubicación actual del pie de apoyo para caminar", según el papel.
El torso, que conecta los brazos y las piernas en un solo ensamblaje, alberga dos computadoras a bordo, múltiples sensores y dos baterías de polímero de litio (LiPo) para alimentar el sistema. Una computadora interactúa con los sensores, recibe comandos, estima estados basados en las lecturas del sensor y calcula las trayectorias. La segunda computadora, que ejecuta los controladores de vuelo de caminata y altitud, interactúa directamente con los actuadores de las piernas y el controlador del motor de la hélice, así como una unidad de medición inercial (IMU) para información de actitud de baja latencia.

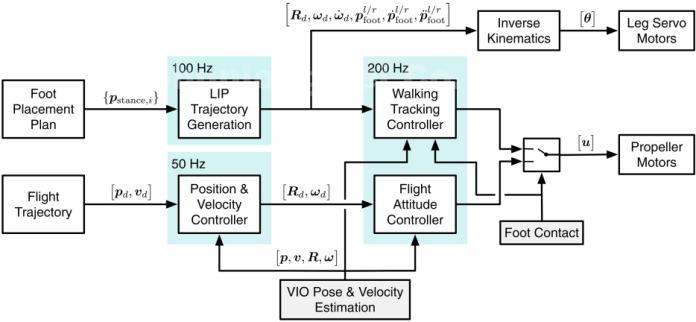
Leyenda: Arquitectura de control de LEO. Haga clic para una imagen más grande. (Fuente: Caltech)
El equipo de Caltech realizó una serie de pruebas tanto en exteriores como en interiores. Estas pruebas incluyeron caminar en un terreno plano, volar y caminar sincronizados, caminar y mantener el equilibrio sobre una cuerda floja y montar una patineta alrededor de los conos de tráfico utilizando el empuje de sus hélices.
Caltech informó que los investigadores planean crear un diseño de pata más rígido que pueda soportar más peso del robot y aumentar la fuerza de empuje de las hélices, así como hacer que el robot sea más autónomo. También planean agregar un algoritmo de control de aterrizaje de drones recientemente desarrollado que utiliza redes neuronales profundas que ayudarán a LEO a comprender mejor el entorno para tomar sus propias decisiones sobre la mejor combinación de caminar, volar o movimiento híbrido.
Los coautores del artículo incluyen a Soon-Jo Chung, profesor Bren de Aeroespacial y Control y Sistemas Dinámicos; Kyunam Kim, investigador postdoctoral en Caltech; Patrick Spieler, un ex miembro del grupo de Chung que se encuentra actualmente en el Laboratorio de Propulsión a Chorro, administrado por Caltech para la NASA; Elena-Sorina Lupu (MS '21), estudiante de posgrado en Caltech, y Alireza Ramezani, ex becaria postdoctoral de Caltech y actualmente profesora asistente en Northeastern University. Esta investigación fue apoyada por el Fondo de Innovación de Caltech Gary Clinard y el Centro de Sistemas y Tecnologías Autónomos de Caltech.