Инженеры Калифорнийского института Технологии (Калифорнийский технологический институт) создал частично шагающего робота и частично летающего дрона, который, как сообщается, может выполнять сложные задачи по передвижению, помимо «простой ходьбы и полета». Двуногий робот LEONARDO (Legs ONboARD DrOne или LEO) может ходить по стропе, прыгать и кататься на скейтборде, а также летать благодаря своей мультимодальной роботизированной платформе для передвижения.
По словам исследователей, использование этой гибридной способности передвижения может открыть двери для ряда приложений, трудных для наземных или воздушных роботов, таких как многоточечный осмотр, ремонт или задачи по замене в местах, труднодоступных для людей. а также стимулировать разработку систем адаптивного шасси, состоящих из управляемых суставов ног для воздушных роботов и других летательных аппаратов.
Исследователи заявили, что платформа, которая сочетает в себе режимы полета и ходьбы с использованием синхронизированного управления распределенными электрическими двигателями и парой многосуставных ног, позволяет выполнять сложные движения, такие как ходьба по натянутой веревке или катание на скейтборде, которые являются сложными для существующих двуногих роботов. .


Маневры передвижения LEO. Щелкните, чтобы увеличить изображение. (Источник: Калифорнийский технологический институт)
Разработанный командой Центра автономных систем и технологий Калифорнийского технологического института (CAST), LEO считается первым роботом, который использует многосуставные опоры и двигатели на основе пропеллера для достижения точного контроля над балансом. Об исследовании сообщалось в статье, опубликованной на сайте Science Robotics.
Согласно исследованию, ЛЕОНАРДО демонстрирует ходьбу с летающими маневрами для преодоления препятствий, используя синхронизированное управление пропеллерами и суставами ног, что потенциально может обеспечить роботизированные миссии и операции, которые невозможны для одномодальных роботов с перемещением. Это означает, что роботы с мультимодальным перемещением по мере необходимости переключаются между режимами ходьбы и полета.
«По сравнению с наземным роботом, LEO может преодолевать любые препятствия, используя переход между наземным и летным режимами, или легко достигать возвышенности с помощью пропеллеров», - комментируют исследователи в статье. «Кроме того, в то время как воздушный робот может зависать над целями, LEO может использовать наземное движение, чтобы приблизиться к ним для более тщательного осмотра. Когда LEO соприкасается с землей или идет при ходьбе, он также может отклонять большие помехи и предотвращать падение даже на чрезвычайно скользких поверхностях, используя синхронизированное управление распределенными гребными винтами и суставами ног, тем самым обеспечивая более надежное и точное движение при ходьбе ».
Вот подробности. LEO имеет при ходьбе рост 75 см и вес 2.58 кг. Он состоит из трех основных подсистем: туловища, пропеллерной двигательной установки и двух ног с точечными опорами (см. Изображение ниже). Он может работать автономно благодаря бортовым компьютерам и датчикам. Номинальная скорость ходьбы составляет 20 см / с, однако, по словам исследователей, ее путевая скорость может значительно увеличиться за счет прерывистого полета при приближении к земле.

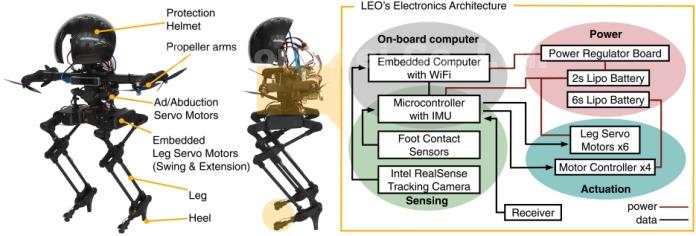
Подпись под фото: основные электронные и механические компоненты LEO. Щелкните, чтобы увеличить изображение. (Источник: Калифорнийский технологический институт)
Каждая опора имеет три серводвигателя (бесщеточные двигатели постоянного тока) для приведения в действие: один перемещает структуру опоры, а два других сервопривода приводят в действие механизм параллельных опор. Двигатели BLDC включают в себя редукторы с высоким редуктором и встроенное управление положением. «Встроенный контроллер положения является точным и достаточно быстрым для управления ногами LEO благодаря низкой инерции ног и широкой полосе пропускания контроллера пропеллера, который стабилизирует походку», - утверждают исследователи.
LEO также использует четыре симметрично расположенных гребных винта на плечах для стабилизации и контроля маневров ходьбы и полета. «Оси вращения гребного винта выбраны так, чтобы обеспечить создание моментов крена, тангажа и рыскания как в положительном, так и в отрицательном направлении относительно центра масс (CoM) для полета и относительно текущего положения стопы для ходьбы», - говорится в бумага.
В торсе, который соединяет руки и ноги в один узел, находятся два бортовых компьютера, несколько датчиков и две литий-полимерные (LiPo) батареи для питания системы. Один компьютер взаимодействует с датчиками, принимает команды, оценивает состояния на основе показаний датчиков и вычисляет траектории. Второй компьютер, на котором работают контроллеры ходьбы и высоты полета, взаимодействует напрямую с приводами ног и контроллером винтового двигателя, а также с инерциальным измерительным блоком (IMU) для получения информации об ориентации с малой задержкой.

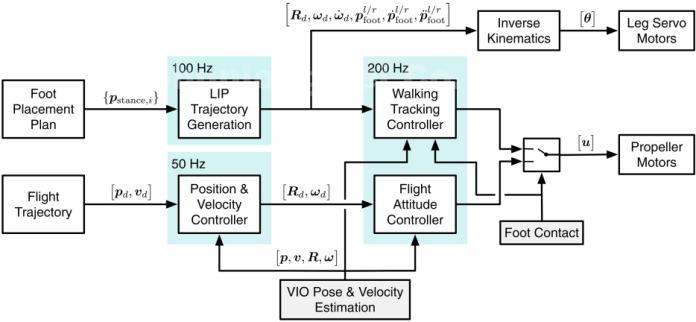
Надпись: Архитектура управления LEO. Щелкните, чтобы увеличить изображение. (Источник: Калифорнийский технологический институт)
Команда Калифорнийского технологического института провела ряд тестов как на открытом воздухе, так и в помещении. Эти тесты включали ходьбу по ровной местности, синхронный полет и ходьбу, ходьбу и балансировку на провисшей веревке, а также катание на скейтборде по конусам движения с использованием тяги пропеллеров.
Caltech сообщил, что исследователи планируют создать более жесткую конструкцию ног, которая сможет выдержать большую часть веса робота и увеличить силу тяги пропеллеров, а также сделать робота более автономным. Они также планируют добавить недавно разработанный алгоритм управления посадкой дронов, который использует глубокие нейронные сети, которые помогут LEO лучше понимать окружающую среду, чтобы принимать собственные решения о наилучшей комбинации ходьбы, полета или гибридного движения.
Соавторы статьи: Сун-Джо Чанг, профессор аэрокосмических и динамических систем управления Бреном; Кюнам Ким, научный сотрудник Калифорнийского технологического института; Патрик Шпилер, бывший член группы Чанга, который в настоящее время работает в Лаборатории реактивного движения, управляемой Калифорнийским технологическим институтом для НАСА; Елена-Сорина Лупу (MS '21), аспирант Калифорнийского технологического института, и Алиреза Рамезани, бывший научный сотрудник Калифорнийского технологического института, а в настоящее время - доцент Северо-Восточного университета. Это исследование было поддержано Инновационным фондом Caltech Gary Clinard и Центром автономных систем и технологий Калифорнийского технологического института.