Insinyur di California Institute of Teknologi (Caltech) telah menciptakan robot yang sebagian berjalan dan sebagian lagi drone terbang yang dilaporkan dapat melakukan tugas penggerak kompleks lebih dari sekadar “berjalan dan terbang”. Robot bipedal LEONARDO (Legs ONboARD drOne, atau LEO) dapat berjalan di garis slackline, melompat, dan mengendarai skateboard serta terbang berkat platform robot penggerak multimodalnya.
Dengan memanfaatkan kemampuan penggerak hibrida ini, kata para peneliti, ini dapat membuka pintu ke berbagai aplikasi yang sulit bagi robot darat atau udara, seperti inspeksi multi-titik, perbaikan, atau tugas penggantian di lokasi yang sulit dijangkau manusia. serta mendorong pengembangan sistem roda pendaratan adaptif yang terdiri dari sambungan kaki yang dikendalikan untuk robot udara dan kendaraan terbang lainnya.
Para peneliti mengatakan platform, yang menggabungkan rezim penggerak terbang dan berjalan menggunakan kontrol tersinkronisasi dari pendorong listrik terdistribusi dan sepasang kaki multi-sendi, memungkinkan gerakan kompleks, seperti berjalan di slackline atau skateboard, yang menantang untuk robot bipedal yang ada. .


Manuver penggerak LEO. Klik untuk gambar yang lebih besar. (Sumber: Caltech)
Dikembangkan oleh tim di Caltech's Center for Autonomous Systems and Technologies (CAST), LEO dikatakan sebagai robot pertama yang menggunakan kaki multi-sendi dan pendorong berbasis baling-baling untuk mencapai kontrol presisi atas keseimbangannya. Penelitian ini dilaporkan dalam sebuah makalah yang diterbitkan online di Science Robotics.
LEONARDO mendemonstrasikan gerakan berjalan dengan manuver terbang untuk mengatasi rintangan menggunakan kontrol baling-baling dan sendi kaki yang disinkronkan, yang berpotensi memungkinkan misi dan operasi robotik yang tidak mungkin dilakukan robot penggerak modal tunggal, menurut makalah penelitian. Ini berarti robot dengan penggerak multimodal beralih antara mode berjalan dan terbang sesuai kebutuhan.
“Dibandingkan dengan robot darat, LEO dapat mengatasi rintangan apa pun menggunakan transisi antara mode darat dan terbangnya atau dengan mudah mencapai lokasi yang lebih tinggi menggunakan baling-baling,” komentar para peneliti dalam makalah tersebut. “Selain itu, sementara robot udara dapat melayang di atas target, LEO dapat menggunakan penggerak daratnya untuk mendekati mereka untuk pemeriksaan lebih dekat. Saat LEO bersentuhan dengan tanah atau berjalan, ia juga dapat menolak gangguan besar dan mencegah jatuh bahkan di permukaan yang sangat licin dengan menggunakan kontrol tersinkronisasi dari baling-baling dan sambungan kaki yang didistribusikan, sehingga memungkinkan gerakan berjalan yang lebih kuat dan presisi.”
Berikut rinciannya. LEO memiliki tinggi 75 cm saat berjalan dan berat 2.58 kg. Ini terdiri dari tiga subsistem utama: batang tubuh, sistem propulsi baling-baling, dan dua kaki dengan kaki titik (lihat gambar di bawah). Itu dapat beroperasi secara mandiri berkat komputer dan sensor bawaannya. Kecepatan berjalan nominalnya adalah 20 cm/s, namun, kata para peneliti, kecepatan geraknya dapat meningkat secara signifikan dengan menggunakan terbang berselang saat dekat dengan tanah.

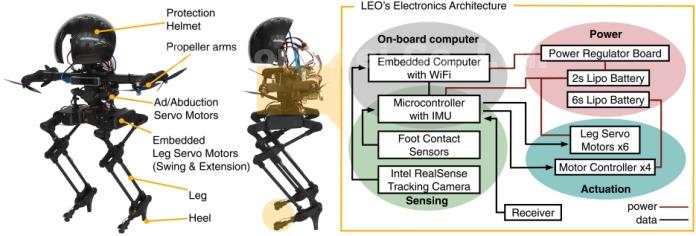
Keterangan: Komponen elektronik dan mekanik utama LEO. Klik untuk gambar yang lebih besar. (Sumber: Caltech)
Setiap kaki memiliki tiga motor servo (motor DC brushless) untuk aktuasi: satu menggerakkan struktur kaki, sedangkan dua aktuator servo lainnya menggerakkan mekanisme kaki paralel. Motor BLDC menggabungkan gearbox reduksi tinggi dan kontrol posisi tertanam. “Pengontrol posisi tertanam tepat dan cukup cepat untuk kontrol kaki LEO karena kelembaman kaki yang rendah dan bandwidth tinggi dari pengontrol baling-baling yang menstabilkan gaya berjalan,” menurut para peneliti.
LEO juga menggunakan empat baling-baling yang ditempatkan secara simetris di bahunya untuk menstabilkan dan mengendalikan manuver berjalan dan terbang. “Sumbu rotasi baling-baling dipilih untuk memungkinkan pembangkitan momen roll, pitch, dan yaw dalam arah positif dan negatif tentang pusat massa (CoM) untuk terbang dan tentang lokasi berdiri kaki saat ini untuk berjalan,” menurut kertas.
Batang tubuh, yang menghubungkan lengan dan kaki menjadi satu rakitan, menampung dua komputer onboard, beberapa sensor, dan dua baterai lithium polymer (LiPo) untuk memberi daya pada sistem. Satu komputer berinteraksi dengan sensor, menerima perintah, memperkirakan status berdasarkan pembacaan sensor, dan menghitung lintasan. Komputer kedua, yang menjalankan pengontrol penerbangan berjalan dan ketinggian, berinteraksi langsung dengan aktuator kaki dan pengontrol motor baling-baling serta unit pengukuran inersia (IMU) untuk informasi sikap latensi rendah.

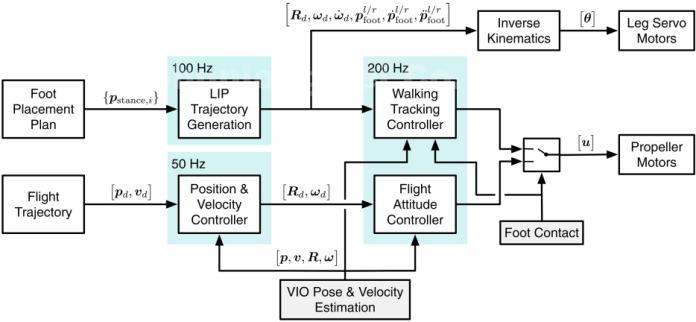
Keterangan: Arsitektur kontrol LEO. Klik untuk gambar yang lebih besar. (Sumber: Caltech)
Tim Caltech melakukan sejumlah tes baik di luar ruangan maupun di dalam ruangan. Tes-tes ini termasuk berjalan di medan yang datar, terbang dan berjalan yang sinkron, berjalan dan menyeimbangkan di atas tali yang kendur, dan mengendarai skateboard di sekitar kerucut lalu lintas dengan menggunakan daya dorong baling-balingnya.
Caltech melaporkan bahwa para peneliti berencana untuk membuat desain kaki yang lebih kaku yang dapat menopang lebih banyak bobot robot dan meningkatkan gaya dorong baling-baling serta membuat robot lebih otonom. Mereka juga berencana untuk menambahkan algoritme kontrol pendaratan drone yang baru dikembangkan yang menggunakan jaringan saraf dalam yang akan membantu LEO memiliki pemahaman yang lebih baik tentang lingkungan untuk membuat keputusan sendiri tentang kombinasi terbaik dari gerakan berjalan, terbang, atau hibrida.
Rekan penulis makalah ini termasuk Soon-Jo Chung, Profesor Bren dari Aerospace and Control and Dynamical Systems; Kyunam Kim, peneliti pascadoktoral di Caltech; Patrick Spieler, mantan anggota grup Chung yang saat ini bekerja di Jet Propulsion Laboratory, yang dikelola oleh Caltech untuk NASA; Elena-Sorina Lupu (MS '21), mahasiswa pascasarjana di Caltech, dan Alireza Ramezani, mantan sarjana postdoctoral Caltech dan saat ini menjadi asisten profesor di Northeastern University. Penelitian ini didukung oleh Caltech Gary Clinard Innovation Fund dan Pusat Sistem dan Teknologi Otonom Caltech.