
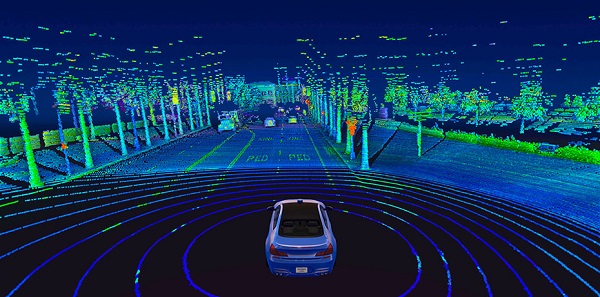
إذا رأيت سيارة ذاتية القيادة في البرية ، فقد تلاحظ وجود أسطوانة عملاقة تدور فوق سطحها. هذا ليدار مدخل بطاقة الذاكرة : نعم ، وهو يعمل عن طريق إرسال نبضات من ضوء الأشعة تحت الحمراء وقياس الوقت الذي تستغرقه هذه النبضات لترتد عن الأجسام. يؤدي هذا إلى إنشاء خريطة لنقاط ثلاثية الأبعاد تعمل كلقطة لمحيط السيارة.
أحد الجوانب السلبية لـ lidar هو أن بياناته ثلاثية الأبعاد هائلة ومكثفة من الناحية الحسابية. على سبيل المثال ، ينتج المستشعر النموذجي ذو 3 قناة أكثر من 64 مليون نقطة في الثانية. نظرًا للأبعاد المكانية الإضافية ، تتطلب أحدث النماذج ثلاثية الأبعاد حسابًا أكثر 2 مرة في وقت الاستدلال مقارنة بنظيراتها من الصور ثنائية الأبعاد. هذا يعني أنه من أجل التنقل بفاعلية ، يتعين على المهندسين أولاً عادةً طي البيانات إلى ثنائية الأبعاد - التأثير الجانبي لذلك هو أنه يتسبب في فقد معلومات كبيرة.
لكن فريقًا من معهد ماساتشوستس للتكنولوجيا كان يعمل على نظام قيادة ذاتي يستخدم التعلم الآلي بحيث لا تكون هناك حاجة إلى ضبط يدوي مخصص. يمكن لإطار العمل الجديد الشامل الخاص بهم التنقل بشكل مستقل باستخدام بيانات سحابة ثلاثية الأبعاد أولية وخرائط GPS منخفضة الدقة ، مماثلة لتلك المتوفرة على الهواتف الذكية اليوم.
يعد التعلم الشامل من بيانات الليدار الخام عملية حسابية مكثفة لأنها تتضمن إعطاء الكمبيوتر كميات هائلة من المعلومات الحسية الغنية لتعلم كيفية التوجيه. لهذا السبب ، كان على الفريق أن يصمم مكونات التعلم العميق الجديدة التي استفادت من أجهزة GPU الحديثة بشكل أكثر كفاءة من أجل التحكم في السيارة في الوقت الفعلي.
"لقد قمنا بتحسين الحل الخاص بنا من منظور الخوارزمية والنظام ، وحققنا تسريعًا تراكميًا تقريبًا 9x مقارنةً بأساليب الليدار ثلاثية الأبعاد الحالية" ، كما يقول دكتوراه. الطالب Zhijian Liu ، الذي كان المؤلف الرئيسي المشارك لهذه الورقة جنبًا إلى جنب مع Alexander Amini.
في الاختبارات ، أظهر الباحثون أن نظامهم قلل من عدد المرات التي اضطر فيها السائق البشري إلى السيطرة على الماكينة ، ويمكنه أيضًا تحمل أعطال أجهزة الاستشعار الشديدة.
على سبيل المثال ، تخيل نفسك تقود سيارتك عبر نفق ثم تخرج في ضوء الشمس - لجزء من الثانية ، من المحتمل أن تواجه عيناك مشاكل في الرؤية بسبب الوهج. تظهر مشكلة مماثلة مع الكاميرات في السيارات ذاتية القيادة ، وكذلك مع أجهزة استشعار ليدار للأنظمة عندما تكون الظروف الجوية سيئة.
للتعامل مع هذا الأمر ، يمكن لنظام فريق معهد ماساتشوستس للتكنولوجيا تقدير مدى تأكده من أي تنبؤ معين ، وبالتالي يمكنه إعطاء وزناً أكبر أو أقل لهذا التوقع في اتخاذ قراراته. (في حالة الخروج من نفق ، فإنه يتجاهل بشكل أساسي أي تنبؤ لا ينبغي الوثوق به بسبب بيانات المستشعر غير الدقيقة.)
يسمي الفريق نهجهم "اندماج الأدلة الهجين" ، لأنه يدمج تنبؤات التحكم المختلفة معًا للوصول إلى خيارات تخطيط الحركة.
تقول دانييلا روس ، أستاذة معهد ماساتشوستس للتكنولوجيا ، إحدى كبار المؤلفين في الورقة: "من خلال دمج تنبؤات التحكم وفقًا لعدم اليقين في النموذج ، يمكن للنظام التكيف مع الأحداث غير المتوقعة".
في كثير من النواحي ، يعد النظام نفسه اندماجًا لثلاثة مشاريع سابقة لمعهد ماساتشوستس للتكنولوجيا:
- MapLite ، إطار عمل مضبوط يدويًا للقيادة بدون خرائط ثلاثية الأبعاد عالية الدقة
- "التنقل المتنوع من طرف إلى طرف" ، وهو نظام تعلم آلي يتم تدريبه على استخدام بيانات القيادة البشرية لمعرفة كيفية التنقل من نقطة الصفر
- SPVNAS ، وسيلة فعالة 3D حل التعلم العميق الذي يحسن العمارة العصبية ومكتبة الاستدلال
يقول أميني: "لقد استفدنا من نهج القيادة بدون خرائط وقمنا بدمجه مع التعلم الآلي الشامل حتى لا نحتاج إلى مبرمجين خبراء لضبط النظام يدويًا".
كخطوة تالية ، يخطط الفريق لمواصلة توسيع نطاق نظامهم إلى كميات متزايدة من التعقيد في العالم الحقيقي ، بما في ذلك الظروف الجوية السيئة والتفاعل الديناميكي مع المركبات الأخرى.