
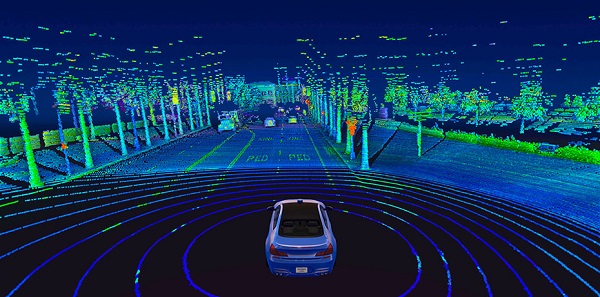
Nếu bạn nhìn thấy một chiếc ô tô tự lái ngoài tự nhiên, bạn có thể nhận thấy một hình trụ quay khổng lồ trên nóc của nó. Đó là một kẻ lừa đảo cảm biến, và nó hoạt động bằng cách phát ra các xung ánh sáng hồng ngoại và đo thời gian chúng bật ra khỏi vật thể. Điều này tạo ra một bản đồ các điểm 3D dùng làm ảnh chụp nhanh xung quanh ô tô.
Một nhược điểm của lidar là dữ liệu 3D của nó rất lớn và chuyên sâu về tính toán. Ví dụ, một cảm biến 64 kênh điển hình tạo ra hơn 2 triệu điểm mỗi giây. Do kích thước không gian bổ sung, các mô hình 3D hiện đại yêu cầu tính toán nhiều hơn 14 lần tại thời điểm suy luận so với các đối tác hình ảnh 2D của chúng. Điều này có nghĩa là, để điều hướng hiệu quả, trước tiên, các kỹ sư thường phải thu gọn dữ liệu thành 2D — tác dụng phụ của việc này là làm mất thông tin đáng kể.
Nhưng một nhóm từ MIT đã làm việc trên một hệ thống tự lái sử dụng máy học để điều chỉnh bằng tay tùy chỉnh là không cần thiết. Khung end-to-end mới của họ có thể điều hướng tự động chỉ bằng cách sử dụng dữ liệu đám mây điểm 3D thô và bản đồ GPS có độ phân giải thấp, tương tự như những thứ có sẵn trên điện thoại thông minh ngày nay.
Học từ đầu đến cuối từ dữ liệu thô là một quá trình đòi hỏi nhiều tính toán vì nó liên quan đến việc cung cấp cho máy tính một lượng lớn thông tin cảm quan phong phú để học cách lái xe. Do đó, nhóm đã thực sự phải thiết kế các thành phần học sâu mới tận dụng phần cứng GPU hiện đại hiệu quả hơn để điều khiển phương tiện trong thời gian thực.
Tiến sĩ cho biết: “Chúng tôi đã tối ưu hóa giải pháp của mình từ cả quan điểm thuật toán và hệ thống, đạt được tốc độ tích lũy khoảng 9x so với các phương pháp tiếp cận lidar 3D hiện có”. sinh viên Zhijian Liu, đồng tác giả của bài báo này cùng với Alexander Amini.
Trong các thử nghiệm, các nhà nghiên cứu đã chỉ ra rằng hệ thống của họ đã giảm tần suất người lái xe phải kiểm soát máy và thậm chí có thể chống lại các lỗi cảm biến nghiêm trọng.
Ví dụ: hình ảnh bạn đang lái xe qua một đường hầm và sau đó ló dạng dưới ánh sáng mặt trời — trong tích tắc, đôi mắt của bạn có thể gặp khó khăn khi nhìn vì ánh sáng chói. Một vấn đề tương tự cũng xảy ra với camera trong ô tô tự lái, cũng như với cảm biến nắp đậy của hệ thống khi điều kiện thời tiết xấu.
Để xử lý điều này, hệ thống của nhóm MIT có thể ước tính mức độ chắc chắn của nó đối với bất kỳ dự đoán nhất định nào và do đó có thể đưa ra ít nhiều trọng lượng cho dự đoán đó trong việc đưa ra quyết định. (Trong trường hợp xuất hiện từ một đường hầm, về cơ bản nó sẽ bỏ qua bất kỳ dự đoán nào không đáng tin cậy do dữ liệu cảm biến không chính xác.)
Nhóm nghiên cứu gọi cách tiếp cận của họ là “hợp nhất vật chứng lai”, bởi vì nó kết hợp các dự đoán điều khiển khác nhau với nhau để đi đến các lựa chọn lập kế hoạch chuyển động.
Giáo sư Daniela Rus của MIT, một trong những tác giả cao cấp của bài báo cho biết: “Bằng cách kết hợp các dự đoán điều khiển theo độ không chắc chắn của mô hình, hệ thống có thể thích ứng với các sự kiện bất ngờ.
Theo nhiều khía cạnh, bản thân hệ thống là sự kết hợp của ba dự án MIT trước đây:
- MapLite, một khung được điều chỉnh thủ công để lái xe mà không cần bản đồ 3D độ nét cao
- "Điều hướng từ đầu đến cuối biến thể", một hệ thống học máy được đào tạo bằng cách sử dụng dữ liệu lái xe của con người để tìm hiểu cách điều hướng từ đầu
- SPVNAS, một 3D giải pháp học sâu tối ưu hóa kiến trúc thần kinh và thư viện suy luận
Amini cho biết: “Chúng tôi đã tận dụng những lợi ích của phương pháp lái xe không cần bản đồ và kết hợp nó với công nghệ máy học đầu cuối để chúng tôi không cần các lập trình viên chuyên nghiệp điều chỉnh hệ thống bằng tay.
Bước tiếp theo, nhóm có kế hoạch tiếp tục mở rộng hệ thống của họ để tăng mức độ phức tạp trong thế giới thực, bao gồm các điều kiện thời tiết bất lợi và tương tác động với các phương tiện khác.