
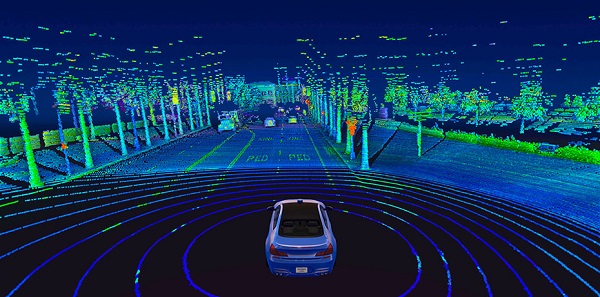
Sekiranya anda melihat sebuah kereta yang memandu sendiri di luar, anda mungkin akan melihat silinder berputar gergasi di atas bumbungnya. Itu lidar sensor, dan berfungsi dengan mengirimkan denyut cahaya inframerah dan mengukur masa yang diperlukan untuk memantul objek. Ini membuat peta titik 3D yang berfungsi sebagai gambaran persekitaran kereta.
Satu kelemahan lidar adalah bahawa data 3Dnya sangat besar dan memerlukan pengiraan. Sensor 64-saluran khas, misalnya, menghasilkan lebih dari 2 juta mata sesaat. Oleh kerana dimensi spatial tambahan, model 3D yang canggih memerlukan pengiraan 14x lebih banyak pada masa inferensi berbanding dengan gambar 2D mereka. Ini bererti bahawa, untuk menavigasi dengan berkesan, jurutera biasanya harus memasukkan data menjadi 2D - kesan sampingan dari ini adalah bahawa ia memperkenalkan kehilangan maklumat yang ketara.
Tetapi pasukan dari MIT telah mengerjakan sistem pemanduan sendiri yang menggunakan pembelajaran mesin sehingga penyesuaian tangan khusus tidak diperlukan. Rangka kerja ujung ke hujung baru mereka dapat menavigasi secara autonomi hanya menggunakan data awan titik 3D mentah dan peta GPS resolusi rendah, serupa dengan yang terdapat di telefon pintar hari ini.
Pembelajaran end-to-end dari data lidar mentah adalah proses intensif komputasi kerana melibatkan memberi komputer sejumlah besar maklumat sensori yang kaya untuk belajar cara mengarahkan. Oleh kerana itu, pasukan harus merancang komponen pembelajaran mendalam baru yang memanfaatkan perkakasan GPU moden dengan lebih cekap untuk mengawal kenderaan dalam masa nyata.
"Kami telah mengoptimumkan penyelesaian kami dari perspektif algoritma dan sistem, mencapai kelajuan kumulatif kira-kira 9x berbanding pendekatan lidar 3D yang ada," kata Ph.D. pelajar Zhijian Liu, yang merupakan pengarang utama dalam makalah ini bersama Alexander Amini.
Dalam ujian, para penyelidik menunjukkan bahawa sistem mereka mengurangkan seberapa sering pemandu manusia harus mengambil alih kawalan dari mesin, dan bahkan dapat menahan kegagalan sensor yang teruk.
Contohnya, bayangkan diri anda melalui terowong dan kemudian muncul di bawah sinar matahari — untuk beberapa saat, mata anda mungkin menghadapi masalah melihat kerana silau. Masalah yang sama timbul dengan kamera di dalam kenderaan yang memandu sendiri, dan juga dengan sensor lidar sistem ketika keadaan cuaca buruk.
Untuk menangani hal ini, sistem pasukan MIT dapat mengira sejauh mana pasti tentang ramalan yang diberikan, dan oleh itu dapat memberikan lebih banyak atau lebih berat ramalan tersebut dalam membuat keputusannya. (Sekiranya muncul dari terowong, pada dasarnya akan mengabaikan ramalan yang tidak dapat dipercaya kerana data sensor yang tidak tepat.)
Pasukan ini memanggil pendekatan mereka "gabungan bukti hibrid," kerana ia menggabungkan ramalan kawalan yang berbeza untuk mencapai pilihan perancangan gerakannya.
"Dengan menggabungkan ramalan kawalan mengikut ketidakpastian model, sistem dapat menyesuaikan diri dengan kejadian yang tidak dijangka," kata profesor MIT, Daniela Rus, salah seorang penulis senior di makalah tersebut.
Dalam banyak aspek, sistem itu sendiri merupakan gabungan tiga projek MIT sebelumnya:
- MapLite, kerangka kerja yang disesuaikan untuk memandu tanpa peta 3D definisi tinggi
- "Navigasi end-to-end variasi," sistem pembelajaran mesin yang dilatih menggunakan data pemanduan manusia untuk belajar bagaimana menavigasi dari awal
- SPVNAS, cekap 3D penyelesaian pembelajaran mendalam yang mengoptimumkan seni bina saraf dan perpustakaan inferensi
"Kami telah mengambil keuntungan dari pendekatan pemanduan tanpa peta dan menggabungkannya dengan pembelajaran mesin ujung ke ujung sehingga kami tidak memerlukan pengaturcara pakar untuk menyesuaikan sistem dengan tangan," kata Amini.
Sebagai langkah seterusnya, pasukan berencana untuk terus meningkatkan sistem mereka untuk meningkatkan jumlah kerumitan di dunia nyata, termasuk keadaan cuaca buruk dan interaksi dinamis dengan kenderaan lain.