
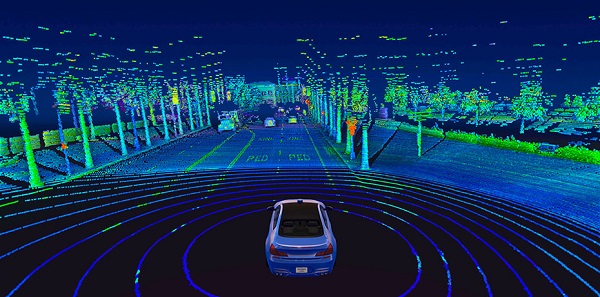
Si ve un automóvil autónomo en la naturaleza, es posible que observe un cilindro giratorio gigante en la parte superior de su techo. Eso es un lidar sensor, y funciona enviando pulsos de luz infrarroja y midiendo el tiempo que tardan en rebotar en los objetos. Esto crea un mapa de puntos 3D que sirve como instantánea de los alrededores del automóvil.
Una desventaja de LIDAR es que sus datos 3D son inmensos y computacionalmente intensivos. Un sensor típico de 64 canales, por ejemplo, produce más de 2 millones de puntos por segundo. Debido a la dimensión espacial adicional, los modelos 3D de última generación requieren 14 veces más cálculos en el tiempo de inferencia en comparación con sus contrapartes de imágenes 2D. Esto significa que, para navegar eficazmente, los ingenieros primero tienen que colapsar los datos en 2D; el efecto secundario de esto es que introduce una pérdida significativa de información.
Pero un equipo del MIT ha estado trabajando en un sistema de conducción autónoma que utiliza el aprendizaje automático para que no sea necesario un ajuste manual personalizado. Su nuevo marco de trabajo de extremo a extremo puede navegar de forma autónoma utilizando solo datos de nubes de puntos 3D sin procesar y mapas GPS de baja resolución, similares a los disponibles en los teléfonos inteligentes en la actualidad.
El aprendizaje de extremo a extremo a partir de datos LIDAR sin procesar es un proceso computacionalmente intensivo, ya que implica proporcionar a la computadora grandes cantidades de información sensorial rica para aprender a conducir. Debido a esto, el equipo tuvo que diseñar nuevos componentes de aprendizaje profundo que aprovecharan el hardware de GPU moderno de manera más eficiente para controlar el vehículo en tiempo real.
“Hemos optimizado nuestra solución desde la perspectiva del algoritmo y del sistema, logrando una aceleración acumulativa de aproximadamente 9 veces en comparación con los enfoques LIDAR 3D existentes”, dice Ph.D. estudiante Zhijian Liu, quien fue el coautor principal de este artículo junto con Alexander Amini.
En las pruebas, los investigadores demostraron que su sistema reducía la frecuencia con la que un conductor humano tenía que tomar el control de la máquina e incluso podía soportar fallas graves en los sensores.
Por ejemplo, imagínese conduciendo a través de un túnel y luego emergiendo a la luz del sol; durante una fracción de segundo, es probable que sus ojos tengan problemas para ver debido al resplandor. Un problema similar surge con las cámaras de los coches autónomos, así como con los sensores lidar de los sistemas cuando las condiciones meteorológicas son adversas.
Para manejar esto, el sistema del equipo del MIT puede estimar qué tan seguro es sobre cualquier predicción dada y, por lo tanto, puede dar más o menos peso a esa predicción al tomar sus decisiones. (En el caso de salir de un túnel, esencialmente ignoraría cualquier predicción en la que no se deba confiar debido a datos inexactos del sensor).
El equipo llama a su enfoque "fusión de evidencia híbrida", porque fusiona las diferentes predicciones de control para llegar a sus opciones de planificación de movimiento.
“Al fusionar las predicciones de control de acuerdo con la incertidumbre del modelo, el sistema puede adaptarse a eventos inesperados”, dice la profesora del MIT Daniela Rus, una de las autoras principales del artículo.
En muchos aspectos, el sistema en sí es una fusión de tres proyectos anteriores del MIT:
- MapLite, un marco ajustado a mano para conducir sin mapas 3D de alta definición
- "Navegación variacional de extremo a extremo", un sistema de aprendizaje automático que se entrena con datos de conducción humana para aprender a navegar desde cero
- SPVNAS, un eficiente 3D solución de aprendizaje profundo que optimiza la arquitectura neuronal y la biblioteca de inferencias
“Hemos aprovechado los beneficios de un enfoque de conducción sin mapas y lo hemos combinado con el aprendizaje automático de un extremo a otro para que no necesitemos programadores expertos para ajustar el sistema a mano”, dice Amini.
Como siguiente paso, el equipo planea continuar escalando su sistema a cantidades cada vez mayores de complejidad en el mundo real, incluidas las condiciones climáticas adversas y la interacción dinámica con otros vehículos.