
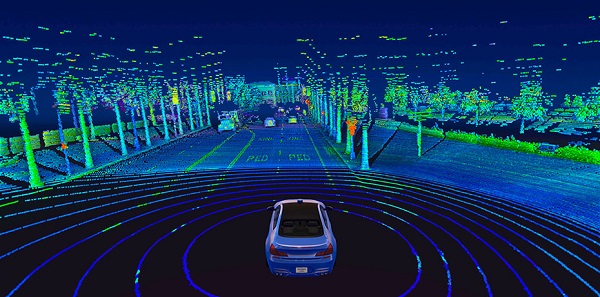
Eğer vahşi doğada sürücüsüz bir araba görürseniz, çatısının üstünde dönen dev bir silindiri fark edebilirsiniz. Bu bir lidar algılayıcıKızılötesi ışık darbeleri göndererek ve bunların nesnelere çarpması için gereken süreyi ölçerek çalışır. Bu, otomobilin çevresinin anlık görüntüsünü sağlayan 3 boyutlu noktalardan oluşan bir harita oluşturur.
Lidar'ın bir dezavantajı, 3 boyutlu verilerinin çok büyük ve hesaplama açısından yoğun olmasıdır. Örneğin tipik bir 64 kanallı sensör saniyede 2 milyondan fazla nokta üretir. Ek uzamsal boyut nedeniyle, son teknoloji ürünü 3D modeller, 14D görüntü muadillerine kıyasla çıkarım zamanında 2 kat daha fazla hesaplama gerektirir. Bu, mühendislerin etkili bir şekilde gezinmek için öncelikle verileri 2B'ye daraltmaları gerektiği anlamına gelir; bunun yan etkisi, önemli miktarda bilgi kaybına yol açmasıdır.
Ancak MIT'den bir ekip, özel elle ayarlamaya gerek kalmaması için makine öğrenimini kullanan, kendi kendini çalıştıran bir sistem üzerinde çalışıyor. Yeni uçtan uca çerçeveleri, günümüzde akıllı telefonlarda bulunanlara benzer şekilde yalnızca ham 3 boyutlu nokta bulutu verilerini ve düşük çözünürlüklü GPS haritalarını kullanarak otonom bir şekilde gezinebiliyor.
Ham Lidar verilerinden uçtan uca öğrenme, hesaplama açısından yoğun bir süreçtir çünkü direksiyonu nasıl kullanacağını öğrenmek için bilgisayara büyük miktarda zengin duyusal bilgi vermeyi içerir. Bu nedenle ekibin, aracı gerçek zamanlı olarak kontrol etmek için modern GPU donanımını daha verimli bir şekilde kullanan yeni derin öğrenme bileşenleri tasarlaması gerekiyordu.
Ph.D. "Çözümümüzü hem algoritma hem de sistem perspektiflerinden optimize ederek mevcut 9D lidar yaklaşımlarına kıyasla yaklaşık 3 kat kümülatif hızlanma elde ettik" diyor. Alexander Amini ile birlikte bu makalenin ortak başyazarı olan öğrenci Zhijian Liu.
Testlerde araştırmacılar, sistemlerinin bir insan sürücünün makinenin kontrolünü ele geçirme sıklığını azalttığını ve hatta ciddi sensör arızalarına bile dayanabildiğini gösterdi.
Örneğin, kendinizi bir tünelden geçerken ve ardından güneş ışığına çıktığınızı hayal edin; bir an için gözlerinizin parlama nedeniyle görme sorunları yaşaması muhtemeldir. Sürücüsüz araçlardaki kameralarda ve hava koşullarının kötü olduğu durumlarda sistemlerin lidar sensörlerinde de benzer bir sorun ortaya çıkıyor.
Bunu halletmek için, MIT ekibinin sistemi herhangi bir tahminin ne kadar kesin olduğunu tahmin edebiliyor ve dolayısıyla kararlarını verirken bu tahmine daha fazla veya daha az ağırlık verebiliyor. (Bir tünelden çıkma durumunda, yanlış sensör verileri nedeniyle güvenilmemesi gereken tahminleri esasen göz ardı edecektir.)
Ekip, yaklaşımını "hibrit kanıtsal füzyon" olarak adlandırıyor çünkü bu yaklaşım, hareket planlama seçeneklerine ulaşmak için farklı kontrol tahminlerini bir araya getiriyor.
Makalenin kıdemli yazarlarından biri olan MIT profesörü Daniela Rus, "Kontrol tahminlerini modelin belirsizliğine göre birleştirerek sistem beklenmedik olaylara uyum sağlayabilir" diyor.
Birçok açıdan sistemin kendisi önceki üç MIT projesinin birleşimidir:
- MapLite, yüksek çözünürlüklü 3D haritalar olmadan sürüş için elle ayarlanmış bir çerçeve
- "Varyasyonel uçtan uca navigasyon", sıfırdan nasıl navigasyon yapılacağını öğrenmek için insan sürüş verilerini kullanarak eğitilen bir makine öğrenme sistemi
- SPVNAS, verimli bir 3D Sinir mimarisini ve çıkarım kitaplığını optimize eden derin öğrenme çözümü
Amini, "Haritasız sürüş yaklaşımının avantajlarından yararlandık ve bunu uçtan uca makine öğrenimiyle birleştirdik, böylece uzman programcıların sistemi elle ayarlamasına ihtiyacımız kalmadı" diyor.
Bir sonraki adım olarak ekip, sistemlerini, olumsuz hava koşulları ve diğer araçlarla dinamik etkileşim de dahil olmak üzere gerçek dünyadaki artan karmaşıklığa göre ölçeklendirmeye devam etmeyi planlıyor.