
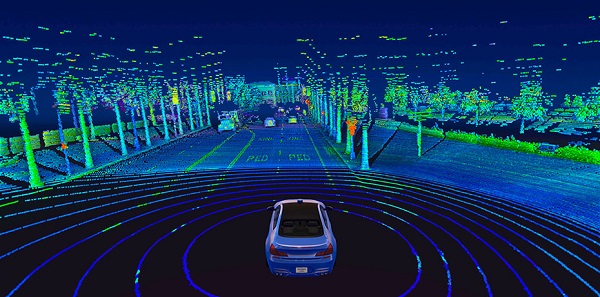
Jika Anda melihat mobil self-driving di alam liar, Anda mungkin melihat silinder berputar raksasa di atas atapnya. Itu lidar Sensor, dan bekerja dengan mengirimkan pulsa cahaya inframerah dan mengukur waktu yang diperlukan untuk memantulkan objek. Ini membuat peta titik 3D yang berfungsi sebagai potret lingkungan mobil.
Salah satu kelemahan lidar adalah data 3D-nya sangat besar dan komputasinya intensif. Sensor 64-saluran tipikal, misalnya, menghasilkan lebih dari 2 juta titik per detik. Karena dimensi spasial tambahan, model 3D tercanggih membutuhkan komputasi 14x lebih banyak pada waktu inferensi dibandingkan dengan rekan gambar 2D mereka. Ini berarti bahwa, untuk bernavigasi secara efektif, pertama-tama para insinyur biasanya harus menciutkan data menjadi 2D—efek sampingnya adalah kehilangan informasi yang signifikan.
Tetapi tim dari MIT telah mengerjakan sistem self-driving yang menggunakan pembelajaran mesin sehingga penyetelan manual tidak diperlukan. Kerangka kerja end-to-end baru mereka dapat bernavigasi secara mandiri hanya menggunakan data cloud titik 3D mentah dan peta GPS resolusi rendah, mirip dengan yang tersedia di smartphone saat ini.
Pembelajaran end-to-end dari data lidar mentah adalah proses komputasi intensif karena melibatkan memberikan komputer sejumlah besar informasi sensorik yang kaya untuk belajar bagaimana mengarahkan. Karena itu, tim harus benar-benar merancang komponen pembelajaran mendalam baru yang memanfaatkan perangkat keras GPU modern secara lebih efisien untuk mengontrol kendaraan secara real-time.
“Kami telah mengoptimalkan solusi kami dari perspektif algoritme dan sistem, mencapai percepatan kumulatif sekitar 9x dibandingkan dengan pendekatan lidar 3D yang ada,” kata Ph.D. mahasiswa Zhijian Liu, yang merupakan penulis pendamping pada makalah ini bersama Alexander Amini.
Dalam pengujian, para peneliti menunjukkan bahwa sistem mereka mengurangi seberapa sering pengemudi manusia harus mengambil kendali dari mesin, dan bahkan dapat menahan kegagalan sensor yang parah.
Misalnya, bayangkan diri Anda mengemudi melalui terowongan dan kemudian muncul di bawah sinar matahari—untuk sepersekian detik, mata Anda kemungkinan akan mengalami masalah penglihatan karena silau. Masalah serupa muncul dengan kamera di mobil self-driving, serta dengan sensor lidar sistem saat kondisi cuaca buruk.
Untuk menangani ini, sistem tim MIT dapat memperkirakan seberapa pasti prediksi yang diberikan, dan karenanya dapat memberikan bobot lebih atau kurang pada prediksi tersebut dalam membuat keputusan. (Dalam kasus muncul dari terowongan, pada dasarnya akan mengabaikan prediksi apa pun yang seharusnya tidak dipercaya karena data sensor yang tidak akurat.)
Tim menyebut pendekatan mereka "fusi bukti hibrida," karena menggabungkan prediksi kontrol yang berbeda bersama-sama untuk sampai pada pilihan perencanaan geraknya.
“Dengan menggabungkan prediksi kontrol sesuai dengan ketidakpastian model, sistem dapat beradaptasi dengan kejadian tak terduga,” kata profesor MIT Daniela Rus, salah satu penulis senior di makalah tersebut.
Dalam banyak hal, sistem itu sendiri merupakan perpaduan dari tiga proyek MIT sebelumnya:
- MapLite, kerangka kerja yang disesuaikan untuk mengemudi tanpa peta 3D definisi tinggi
- “navigasi ujung ke ujung yang bervariasi”, sistem pembelajaran mesin yang dilatih menggunakan data mengemudi manusia untuk mempelajari cara menavigasi dari awal
- SPVNAS, efisien 3D solusi pembelajaran mendalam yang mengoptimalkan arsitektur saraf dan perpustakaan inferensi
“Kami telah mengambil manfaat dari pendekatan mengemudi tanpa peta dan menggabungkannya dengan pembelajaran mesin end-to-end sehingga kami tidak memerlukan programmer ahli untuk menyetel sistem secara manual,” kata Amini.
Sebagai langkah selanjutnya, tim berencana untuk terus meningkatkan skala sistem mereka untuk meningkatkan jumlah kompleksitas di dunia nyata, termasuk kondisi cuaca buruk dan interaksi dinamis dengan kendaraan lain.