
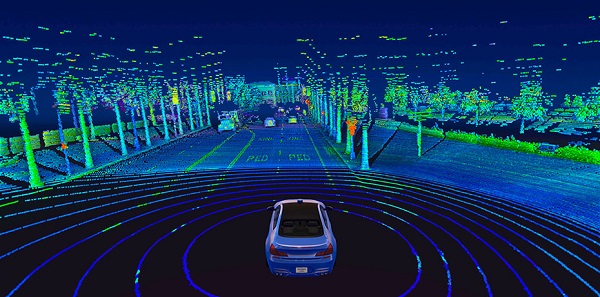
หากคุณเห็นรถที่ขับเองอยู่ในป่า คุณอาจสังเกตเห็นกระบอกหมุนขนาดยักษ์อยู่บนหลังคา นั่นมันลิดาร์ เซ็นเซอร์และทำงานโดยส่งพัลส์ของแสงอินฟราเรดและวัดเวลาที่ใช้ในการกระเด็นวัตถุ สิ่งนี้จะสร้างแผนที่ของจุด 3 มิติที่ทำหน้าที่เป็นภาพรวมของสภาพแวดล้อมของรถ
ข้อเสียอย่างหนึ่งของ Lidar คือข้อมูล 3D นั้นใหญ่โตและเข้มข้นในการคำนวณ ตัวอย่างเช่น เซนเซอร์ 64 แชนเนลทั่วไป สามารถผลิตจุดมากกว่า 2 ล้านจุดต่อวินาที เนื่องจากมิติเชิงพื้นที่เพิ่มเติม โมเดล 3 มิติที่ล้ำสมัยจึงต้องการการคำนวณมากกว่า 14 เท่าในเวลาอนุมาน เมื่อเทียบกับภาพ 2 มิติที่เหมือนกัน ซึ่งหมายความว่า เพื่อที่จะนำทางได้อย่างมีประสิทธิภาพ วิศวกรจะต้องยุบข้อมูลเป็น 2D ก่อนเป็นอันดับแรก ซึ่งผลข้างเคียงของสิ่งนี้คือการทำให้ข้อมูลสูญหายอย่างมีนัยสำคัญ
แต่ทีมจาก MIT กำลังทำงานเกี่ยวกับระบบขับเคลื่อนอัตโนมัติที่ใช้การเรียนรู้ของเครื่อง ดังนั้นจึงไม่จำเป็นต้องปรับแต่งเองด้วยมือ เฟรมเวิร์กแบบ end-to-end ใหม่ของพวกเขาสามารถนำทางได้ด้วยตนเองโดยใช้ข้อมูลคลาวด์แบบจุด 3 มิติดิบและแผนที่ GPS ความละเอียดต่ำเท่านั้น ซึ่งคล้ายกับที่มีในสมาร์ทโฟนในปัจจุบัน
การเรียนรู้จากต้นทางถึงปลายทางจากข้อมูลดิบที่เป็นข้อมูลดิบเป็นกระบวนการที่ต้องใช้คอมพิวเตอร์มาก เนื่องจากเป็นการให้ข้อมูลทางประสาทสัมผัสจำนวนมากแก่คอมพิวเตอร์เพื่อเรียนรู้วิธีการคัดท้าย ด้วยเหตุนี้ ทีมงานจึงต้องออกแบบส่วนประกอบการเรียนรู้เชิงลึกใหม่ซึ่งใช้ประโยชน์จากฮาร์ดแวร์ GPU ที่ทันสมัยอย่างมีประสิทธิภาพมากขึ้นเพื่อควบคุมยานพาหนะในแบบเรียลไทม์
“เราได้ปรับโซลูชันของเราให้เหมาะสมจากทั้งอัลกอริทึมและมุมมองของระบบ บรรลุความเร็วสะสมประมาณ 9 เท่า เมื่อเทียบกับวิธีการ 3D Lidar ที่มีอยู่” Ph.D. กล่าว นักศึกษา Zhijian Liu ซึ่งเป็นผู้เขียนร่วมในบทความนี้ร่วมกับ Alexander Amini
ในการทดสอบ นักวิจัยพบว่าระบบของพวกเขาลดความถี่ที่คนขับต้องควบคุมจากเครื่องจักร และสามารถทนต่อความล้มเหลวของเซ็นเซอร์ที่รุนแรงได้
ตัวอย่างเช่น ลองนึกภาพตัวเองกำลังขับรถผ่านอุโมงค์แล้วออกไปสู่แสงแดด—ในเสี้ยววินาที ดวงตาของคุณอาจมีปัญหาในการมองเห็นเนื่องจากแสงสะท้อน ปัญหาที่คล้ายกันนี้เกิดขึ้นกับกล้องในรถยนต์ที่ขับด้วยตนเอง เช่นเดียวกับเซ็นเซอร์ Lidar ของระบบเมื่อสภาพอากาศไม่ดี
เพื่อจัดการกับสิ่งนี้ ระบบของทีม MIT สามารถประมาณความแน่นอนเกี่ยวกับการทำนายใดๆ ได้ ดังนั้นจึงสามารถให้น้ำหนักมากหรือน้อยแก่การคาดการณ์นั้นในการตัดสินใจ (ในกรณีที่โผล่ออกมาจากอุโมงค์โดยพื้นฐานแล้ว จะไม่คำนึงถึงการคาดการณ์ใดๆ ที่ไม่ควรเชื่อถือได้เนื่องจากข้อมูลเซ็นเซอร์ที่ไม่ถูกต้อง)
ทีมงานเรียกแนวทางของพวกเขาว่า "ไฮบริดหลักฐานฟิวชั่น" เพราะมันหลอมรวมการคาดการณ์การควบคุมต่างๆ เข้าด้วยกันเพื่อให้ได้ตัวเลือกในการวางแผนการเคลื่อนไหว
ศาสตราจารย์ Daniela Rus แห่ง MIT หนึ่งในผู้เขียนอาวุโสของรายงานกล่าวว่า "การรวมการคาดคะเนการควบคุมตามความไม่แน่นอนของแบบจำลอง ระบบสามารถปรับให้เข้ากับเหตุการณ์ที่ไม่คาดคิดได้
ในหลาย ๆ ด้าน ระบบเองเป็นการหลอมรวมของโครงการ MIT ก่อนหน้าสามโครงการ:
- MapLite เฟรมเวิร์กที่ปรับแต่งด้วยมือสำหรับการขับขี่โดยไม่มีแผนที่ 3 มิติความละเอียดสูง
- “การนำทางแบบ end-to-end แบบต่างๆ” ระบบการเรียนรู้ของเครื่องที่ได้รับการฝึกอบรมโดยใช้ข้อมูลการขับขี่ของมนุษย์เพื่อเรียนรู้วิธีการนำทางตั้งแต่เริ่มต้น
- SPVNAS ที่มีประสิทธิภาพ 3D โซลูชันการเรียนรู้เชิงลึกที่ปรับสถาปัตยกรรมประสาทและไลบรารีการอนุมานให้เหมาะสม
Amini กล่าวว่า "เราได้นำประโยชน์ของวิธีการขับขี่แบบไร้แผนที่มาผสมผสานกับการเรียนรู้ของเครื่องแบบ end-to-end เพื่อที่เราจะได้ไม่ต้องอาศัยโปรแกรมเมอร์ผู้เชี่ยวชาญในการปรับแต่งระบบด้วยมือ"
ในขั้นตอนต่อไป ทีมงานวางแผนที่จะขยายระบบของพวกเขาต่อไปเพื่อเพิ่มความซับซ้อนในโลกแห่งความเป็นจริง ซึ่งรวมถึงสภาพอากาศที่ไม่เอื้ออำนวยและการโต้ตอบแบบไดนามิกกับยานพาหนะอื่นๆ