
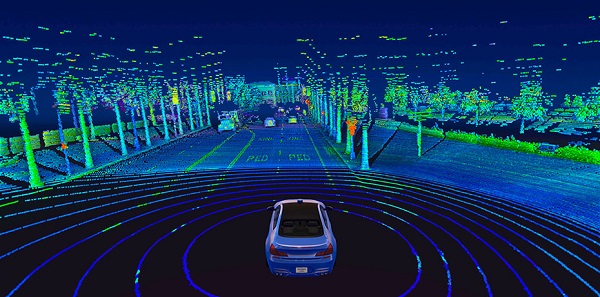
Se vedi un'auto a guida autonoma in natura, potresti notare un gigantesco cilindro rotante in cima al tetto. Questo è un lidar sensore, e funziona inviando impulsi di luce infrarossa e misurando il tempo necessario per rimbalzare sugli oggetti. Questo crea una mappa di punti 3D che funge da istantanea dei dintorni dell'auto.
Uno svantaggio di lidar è che i suoi dati 3D sono immensi e ad alta intensità di calcolo. Un tipico sensore a 64 canali, ad esempio, produce più di 2 milioni di punti al secondo. A causa della dimensione spaziale aggiuntiva, i modelli 3D all'avanguardia richiedono un calcolo 14 volte maggiore al tempo di inferenza rispetto alle loro controparti di immagini 2D. Ciò significa che, per navigare in modo efficace, gli ingegneri devono prima comprimere i dati in 2D: l'effetto collaterale di ciò è che introduce una significativa perdita di informazioni.
Ma un team del MIT ha lavorato su un sistema di guida autonoma che utilizza l'apprendimento automatico in modo che non sia necessaria la messa a punto manuale personalizzata. Il loro nuovo framework end-to-end può navigare autonomamente utilizzando solo dati grezzi di nuvole di punti 3D e mappe GPS a bassa risoluzione, simili a quelle disponibili oggi sugli smartphone.
L'apprendimento end-to-end dai dati lidar grezzi è un processo ad alta intensità di calcolo poiché comporta la fornitura al computer di enormi quantità di ricche informazioni sensoriali per imparare a guidare. Per questo motivo, il team ha dovuto effettivamente progettare nuovi componenti di deep learning che sfruttassero l'hardware GPU moderno in modo più efficiente per controllare il veicolo in tempo reale.
"Abbiamo ottimizzato la nostra soluzione sia dal punto di vista dell'algoritmo che del sistema, ottenendo un'accelerazione cumulativa di circa 9 volte rispetto agli approcci lidar 3D esistenti", afferma il Ph.D. lo studente Zhijian Liu, che è stato co-autore di questo articolo insieme ad Alexander Amini.
Nei test, i ricercatori hanno dimostrato che il loro sistema riduceva la frequenza con cui un guidatore umano doveva prendere il controllo della macchina e poteva persino resistere a gravi guasti dei sensori.
Ad esempio, immagina di guidare attraverso un tunnel e poi emergere alla luce del sole: per una frazione di secondo, i tuoi occhi avranno probabilmente problemi a vedere a causa del bagliore. Un problema simile si presenta con le telecamere delle auto a guida autonoma, così come con i sensori lidar dei sistemi quando le condizioni meteorologiche sono avverse.
Per gestire ciò, il sistema del team del MIT può stimare quanto sia certo di una data previsione e può quindi dare più o meno peso a quella previsione nel prendere le sue decisioni. (Nel caso di emergere da un tunnel, essenzialmente ignorerebbe qualsiasi previsione di cui non ci si dovrebbe fidare a causa di dati del sensore imprecisi.)
Il team chiama il loro approccio "fusione probatoria ibrida", perché fonde insieme le diverse previsioni di controllo per arrivare alle sue scelte di pianificazione del movimento.
"Fondendo le previsioni di controllo in base all'incertezza del modello, il sistema può adattarsi a eventi imprevisti", afferma la professoressa del MIT Daniela Rus, uno degli autori senior dello studio.
Per molti aspetti, il sistema stesso è una fusione di tre precedenti progetti del MIT:
- MapLite, un framework messo a punto a mano per guidare senza mappe 3D ad alta definizione
- "navigazione variazionale end-to-end", un sistema di apprendimento automatico addestrato utilizzando i dati di guida umana per imparare a navigare da zero
- SPVNAS, un efficiente 3D soluzione di deep learning che ottimizza l'architettura neurale e la libreria di inferenza
"Abbiamo sfruttato i vantaggi di un approccio di guida senza mappe e l'abbiamo combinato con l'apprendimento automatico end-to-end in modo da non aver bisogno di programmatori esperti per mettere a punto il sistema a mano", afferma Amini.
Come passo successivo, il team prevede di continuare a ridimensionare il proprio sistema a livelli di complessità crescenti nel mondo reale, comprese condizioni meteorologiche avverse e interazione dinamica con altri veicoli.