
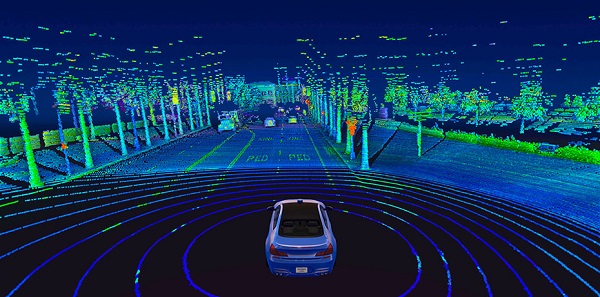
Si vous voyez une voiture autonome dans la nature, vous remarquerez peut-être un cylindre tournant géant au sommet de son toit. C'est un lidar capteur, et cela fonctionne en envoyant des impulsions de lumière infrarouge et en mesurant le temps qu'il leur faut pour rebondir sur les objets. Cela crée une carte de points 3D qui servent d'instantané de l'environnement de la voiture.
L'un des inconvénients du lidar est que ses données 3D sont immenses et gourmandes en calculs. Un capteur typique à 64 canaux, par exemple, produit plus de 2 millions de points par seconde. En raison de la dimension spatiale supplémentaire, les modèles 3D de pointe nécessitent 14 fois plus de calculs au moment de l'inférence par rapport à leurs homologues d'images 2D. Cela signifie que, pour naviguer efficacement, les ingénieurs doivent d'abord réduire les données en 2D, ce qui a pour effet secondaire d'introduire une perte d'informations importante.
Mais une équipe du MIT a travaillé sur un système de conduite autonome qui utilise l'apprentissage automatique afin qu'un réglage manuel personnalisé ne soit pas nécessaire. Leur nouveau cadre de bout en bout peut naviguer de manière autonome en utilisant uniquement des données brutes de nuages de points 3D et des cartes GPS basse résolution, similaires à celles disponibles sur les smartphones aujourd'hui.
L'apprentissage de bout en bout à partir de données lidar brutes est un processus de calcul intensif car il implique de fournir à l'ordinateur d'énormes quantités d'informations sensorielles riches pour apprendre à diriger. Pour cette raison, l'équipe a dû concevoir de nouveaux composants d'apprentissage en profondeur qui exploitaient plus efficacement le matériel GPU moderne afin de contrôler le véhicule en temps réel.
« Nous avons optimisé notre solution du point de vue de l'algorithme et du système, en obtenant une accélération cumulée d'environ 9 fois par rapport aux approches lidar 3D existantes », explique Ph.D. l'étudiant Zhijian Liu, qui était le co-auteur principal de cet article aux côtés d'Alexander Amini.
Lors de tests, les chercheurs ont montré que leur système réduisait la fréquence à laquelle un conducteur humain devait prendre le contrôle de la machine et pouvait même résister à de graves défaillances des capteurs.
Par exemple, imaginez-vous conduire dans un tunnel puis émerger dans la lumière du soleil - pendant une fraction de seconde, vos yeux auront probablement du mal à voir à cause de l'éblouissement. Un problème similaire se pose avec les caméras des voitures autonomes, ainsi qu'avec les capteurs lidar des systèmes lorsque les conditions météorologiques sont mauvaises.
Pour gérer cela, le système de l'équipe du MIT peut estimer à quel point il est certain d'une prédiction donnée, et peut donc donner plus ou moins de poids à cette prédiction dans la prise de ses décisions. (Dans le cas de l'émergence d'un tunnel, cela ignorerait essentiellement toute prédiction à laquelle il ne faut pas faire confiance en raison de données de capteur inexactes.)
L'équipe appelle son approche « fusion hybride de preuves », car elle fusionne les différentes prédictions de contrôle pour arriver à ses choix de planification de mouvement.
"En fusionnant les prédictions de contrôle en fonction de l'incertitude du modèle, le système peut s'adapter à des événements inattendus", explique Daniela Rus, professeur au MIT, l'un des auteurs principaux de l'article.
À bien des égards, le système lui-même est une fusion de trois projets précédents du MIT :
- MapLite, un framework réglé à la main pour conduire sans cartes 3D haute définition
- « navigation variationnelle de bout en bout », un système d'apprentissage automatique qui est formé à l'aide de données de conduite humaine pour apprendre à naviguer à partir de zéro
- SPVNAS, une solution efficace 3D solution d'apprentissage en profondeur qui optimise l'architecture neuronale et la bibliothèque d'inférence
« Nous avons profité des avantages d'une approche de conduite sans carte et l'avons combinée à un apprentissage automatique de bout en bout afin que nous n'ayons pas besoin de programmeurs experts pour régler le système à la main », explique Amini.
Dans une prochaine étape, l'équipe prévoit de continuer à faire évoluer son système vers une complexité croissante dans le monde réel, y compris des conditions météorologiques défavorables et une interaction dynamique avec d'autres véhicules.