
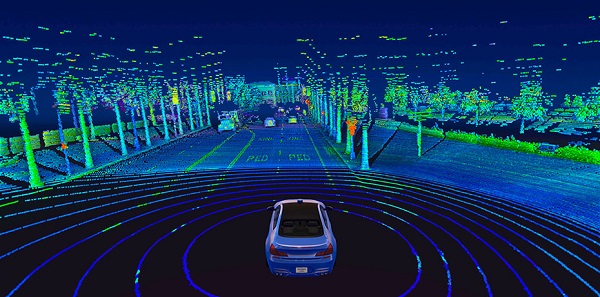
Se você vir um carro que dirige sozinho em estado selvagem, poderá notar um cilindro gigante girando no topo de seu teto. Isso é um lidar sensor, e funciona enviando pulsos de luz infravermelha e medindo o tempo que leva para ricochetear nos objetos. Isso cria um mapa de pontos 3D que servem como um instantâneo dos arredores do carro.
Uma desvantagem do lidar é que seus dados 3D são imensos e intensivos em computação. Um sensor típico de 64 canais, por exemplo, produz mais de 2 milhões de pontos por segundo. Devido à dimensão espacial adicional, os modelos 3D de última geração requerem 14x mais computação no momento da inferência em comparação com suas contrapartes de imagem 2D. Isso significa que, para navegar de forma eficaz, os engenheiros primeiro geralmente têm que recolher os dados em 2D - o efeito colateral disso é que introduz uma perda significativa de informações.
Mas uma equipe do MIT está trabalhando em um sistema autônomo que usa aprendizado de máquina para que o ajuste manual personalizado não seja necessário. Sua nova estrutura de ponta a ponta pode navegar de forma autônoma usando apenas dados brutos de nuvem de pontos 3D e mapas de GPS de baixa resolução, semelhantes aos disponíveis em smartphones hoje.
O aprendizado de ponta a ponta a partir de dados lidar brutos é um processo de computação intensiva, pois envolve fornecer ao computador grandes quantidades de informações sensoriais ricas para aprender a dirigir. Por causa disso, a equipe teve que realmente projetar novos componentes de aprendizado profundo que alavancassem o hardware de GPU moderno de forma mais eficiente para controlar o veículo em tempo real.
“Otimizamos nossa solução das perspectivas do algoritmo e do sistema, alcançando uma aceleração cumulativa de aproximadamente 9x em comparação com as abordagens 3D LIDAR existentes”, diz o Ph.D. o estudante Zhijian Liu, que foi o co-autor principal deste artigo ao lado de Alexander Amini.
Em testes, os pesquisadores mostraram que seu sistema reduzia a frequência com que um motorista humano tinha que assumir o controle da máquina e podia até resistir a falhas graves de sensor.
Por exemplo, imagine-se dirigindo por um túnel e saindo para a luz do sol - por uma fração de segundo, seus olhos provavelmente terão problemas para enxergar por causa do brilho. Um problema semelhante surge com as câmeras em carros autônomos, bem como com os sensores LIDAR dos sistemas quando as condições climáticas são ruins.
Para lidar com isso, o sistema da equipe do MIT pode estimar o quão certo ele tem sobre qualquer predição dada e pode, portanto, dar mais ou menos peso a essa predição ao tomar suas decisões. (No caso de emergir de um túnel, seria essencialmente desconsiderar qualquer previsão que não deva ser confiável devido a dados imprecisos do sensor.)
A equipe chama sua abordagem de “fusão de evidências híbridas”, porque funde as diferentes previsões de controle para chegar às suas escolhas de planejamento de movimento.
“Ao fundir as previsões de controle de acordo com a incerteza do modelo, o sistema pode se adaptar a eventos inesperados”, diz a professora do MIT Daniela Rus, uma das autoras sênior do artigo.
Em muitos aspectos, o próprio sistema é uma fusão de três projetos anteriores do MIT:
- MapLite, uma estrutura ajustada à mão para dirigir sem mapas 3D de alta definição
- "Navegação variacional ponta a ponta", um sistema de aprendizado de máquina que é treinado usando dados de direção humana para aprender a navegar do zero
- SPVNAS, um eficiente 3D solução de aprendizado profundo que otimiza a arquitetura neural e a biblioteca de inferência
“Pegamos os benefícios de uma abordagem de direção sem controle e combinamos com o aprendizado de máquina de ponta a ponta para que não precisemos de programadores especializados para ajustar o sistema manualmente”, diz Amini.
Como uma próxima etapa, a equipe planeja continuar a dimensionar seu sistema para níveis crescentes de complexidade no mundo real, incluindo condições climáticas adversas e interação dinâmica com outros veículos.