
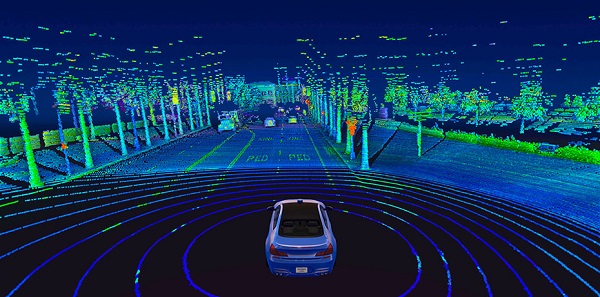
Если вы увидите беспилотный автомобиль в дикой природе, вы можете заметить гигантский вращающийся цилиндр на его крыше. Это лидар датчик, и он работает, посылая импульсы инфракрасного света и измеряя время, необходимое для их отражения от объектов. Это создает карту трехмерных точек, которые служат снимком окружения автомобиля.
Одним из недостатков лидара является то, что его трехмерные данные огромны и требуют больших вычислительных ресурсов. Например, типичный 3-канальный датчик выдает более 64 миллионов точек в секунду. Из-за дополнительного пространственного измерения современные 2D-модели требуют в 3 раз больше вычислений во время вывода по сравнению с их аналогами в 14D-изображениях. Это означает, что для эффективной навигации инженерам в первую очередь приходится преобразовывать данные в 2D - побочным эффектом этого является значительная потеря информации.
Но команда из Массачусетского технологического института работает над системой автоматического вождения, которая использует машинное обучение, так что индивидуальная ручная настройка не требуется. Их новая сквозная структура может выполнять автономную навигацию, используя только необработанные данные трехмерного облака точек и GPS-карты с низким разрешением, аналогичные тем, которые доступны сегодня на смартфонах.
Сквозное обучение на основе необработанных лидарных данных - это вычислительно-интенсивный процесс, поскольку он включает в себя предоставление компьютеру огромных объемов богатой сенсорной информации для обучения управлению. Из-за этого команде пришлось разработать новые компоненты глубокого обучения, которые более эффективно использовали современное оборудование GPU, чтобы управлять транспортным средством в режиме реального времени.
«Мы оптимизировали наше решение как с точки зрения алгоритма, так и с точки зрения системы, достигнув совокупного ускорения примерно в 9 раз по сравнению с существующими подходами с использованием 3D-лидара», - говорит доктор философии. студент Чжицзянь Лю, который был соавтором этой статьи вместе с Александром Амини.
В ходе испытаний исследователи показали, что их система снизила частоту передачи управления машиной водителю-человеку и даже способна противостоять серьезным сбоям датчиков.
Например, представьте, как вы едете через туннель, а затем выходите на солнечный свет - на долю секунды ваши глаза, вероятно, будут плохо видеть из-за яркого света. Аналогичная проблема возникает с камерами в беспилотных автомобилях, а также с лидарными датчиками систем при плохих погодных условиях.
Чтобы справиться с этим, система команды MIT может оценить, насколько она уверена в том или ином прогнозе, и, следовательно, может придать этому прогнозу большее или меньшее значение при принятии решений. (В случае выхода из туннеля он по существу игнорирует любые прогнозы, которым нельзя доверять из-за неточных данных датчика.)
Команда называет свой подход «гибридным доказательным слиянием», потому что он объединяет различные предсказания управления вместе, чтобы прийти к выбору планирования движения.
«Объединяя контрольные прогнозы в соответствии с неопределенностью модели, система может адаптироваться к неожиданным событиям», - говорит профессор Массачусетского технологического института Даниэла Рус, один из ведущих авторов статьи.
Во многих отношениях сама система представляет собой сплав трех предыдущих проектов MIT:
- MapLite, настроенная вручную платформа для вождения без 3D-карт высокой четкости
- «Вариативная сквозная навигация», система машинного обучения, которая обучается с использованием данных о вождении человека, чтобы научиться ориентироваться с нуля.
- СПВНАС, эффективный 3D решение для глубокого обучения, которое оптимизирует нейронную архитектуру и библиотеку логических выводов
«Мы воспользовались преимуществами бесконтактного подхода к вождению и объединили его со сквозным машинным обучением, так что нам не нужны опытные программисты для настройки системы вручную», - говорит Амини.
В качестве следующего шага команда планирует продолжить масштабирование своей системы для повышения уровня сложности в реальном мире, включая неблагоприятные погодные условия и динамическое взаимодействие с другими транспортными средствами.