المحركات الكهربائية هي الأجهزة التي تحول الطاقة الكهربائية إلى طاقة ميكانيكية ، والتي يمكن استخدامها لتحريك الأنظمة المفصلية. يجب أن يكون المحرك الكهربائي قادرًا على إنتاج عزم دوران كبير بسرعات منخفضة وأن يكون فعالًا للغاية عبر نطاق الحمولة. كما يتطلب آلية تحكم وقيادة مباشرة. على الرغم من أنها تتطلب تحكمًا أكثر تعقيدًا ، إلا أن محركات التيار المستمر عديمة الفرشاة (BLDCs) تجد منازل في التطبيقات الروبوتية نظرًا لأدائها الأفضل.
تكتسب محركات BLDC شعبية في جميع المجالات بفضل انخفاض تكاليف الإنتاج. أدى وصول الطائرات بدون طيار والدراجات الإلكترونية ، على وجه الخصوص ، إلى اعتماد واسع النطاق لمحركات BLDC ، والتي كانت تستخدم سابقًا في التطبيقات الصناعية المتطورة فقط.
لقد تغير المهندسون الذين يطورون تطبيقات محرك BLDC على مدار العقدين الماضيين ، مثلما تغيرت عملية التحكم في المحركات. يفضل مهندس اليوم التركيز على ما يجعل تصميم أجهزتهم فريدًا من نوعه بدلاً من إنشاء نظام دفع معقد. يركز المهندسون على التصميمات الأكثر أناقة مع الحد الأدنى من الشكل ، وواجهات المستخدم البديهية ، والإمكانيات في الوقت الفعلي ، والسلامة الوظيفية ، ومشاركة البيانات في السحابة.
مشكلة التحكم
جزء كبير من النظام الآلي هو وحدة التحكم في المحرك. يمكن استخدام العديد من استراتيجيات التحكم لتشغيل مناور آلي، أو ذراع آلية. ال التكنلوجيا استخدامها وكيفية تنفيذها يمكن أن يكون لها تأثير كبير على أداء المعالج، ونتيجة لذلك، على نطاق التطبيقات القابلة للتطبيق. من ناحية أخرى، يؤثر التصميم الميكانيكي للمناول ونظام التشغيل على نوع نظام التحكم الذي يمكن استخدامه.
بينما يتم تحديد وظيفة الروبوت عادةً في مساحة تشغيلية ، يتم تنفيذ إجراءات التحكم في مساحة المفصل من حيث حركة الأجزاء المختلفة للروبوت. نتيجة لذلك ، من المعقول دراسة نوعين من مخططات التحكم: أحدهما للمساحة المشتركة والآخر لمساحة التشغيل. هيكل وحدة التحكم عبارة عن نظام تحكم مغلق الحلقة في كلا المخططين للاستفادة من فوائد التغذية الراجعة من حيث المرونة للتأثيرات غير المعروفة المحتملة على النموذج وتقليل تأثيرات الاضطراب مثل الضوضاء.
تستلزم مسألة التحكم في الفضاء المشترك حل الحركية العكسية للمناور لتحويل متطلبات الحركة من حيز التشغيل إلى الفضاء المشترك. ثم يتم إنشاء مخطط التحكم بحيث يمكن لحركة الهيكل الميكانيكي متابعة الحركة المقصودة. بالمقارنة ، يتطلب التحكم في مساحة التشغيل مستوى أعلى بكثير من التعقيد الحسابي حيث يتم دمج الانعكاس الحركي في نظام الحلقة المغلقة.
إن نظام التشغيل المستخدم ، بالإضافة إلى الأساليب والدوائر المختلفة بناءً على احتياجات المحرك والتطبيق ، مطلوبة للتحكم في سرعة واتجاه المحركات. الهدف من وحدة التحكم في المحرك هو أن تكون قادرة على تشغيل محرك كهربائي يدويًا أو تلقائيًا (بدء - توقف ، انعكاس ، سرعة ، الالتواء ، وحماية ضد الجهد االكهربى الزائدة).
تتمتع المحركات التقليدية بعدد من الفوائد التي لا تتمتع بها محركات BLDC. يمكن للمحركات المتزامنة المغناطيسية الدائمة (PMSM) التي تعمل بنظام BLDC و AC أن توفر الدقة المطلوبة والكفاءة العالية في عامل الشكل المضغوط. بالإضافة إلى ذلك ، فإن محركات التيار المستمر من نوع الفرشاة والمحركات الحثية للتيار المتردد سهلة التوصيل والتشغيل ، على عكس BLDCs و PMSMs ، وهي أكثر تعقيدًا.


تتضمن مجموعة المحرك DRV8301-69M-KIT أ ثلاث مراحل سائق مع باك متكامل منظم ومكبرات الصوت التحويلية الحالية. انقر للحصول على صورة أكبر. (المصدر: شركة تكساس إنسترومنتس)
على سبيل المثال ، تستخدم BLDCs تقنيات مثل التحكم في النواقل بدون أجهزة استشعار (وتسمى أيضًا التحكم الميداني ، أو FOC) التي توفر كفاءة جيدة وميزة التخلص مدخل بطاقة الذاكرة : نعم الأجهزة ، وبالتالي تقليل التكلفة وتحسين الموثوقية. تكمن مشكلة المصممين في أن التحكم في النواقل بدون أجهزة استشعار أمر معقد في التنفيذ ، لذا فإن استخدامه يمكن أن يطيل وقت التطوير ، مضيفًا التكلفة وربما يتجاوز توقعات الوقت المستغرق في السوق.
لحل هذه المعضلة ، يمكن للمصممين اللجوء إلى منصات التطوير مثل طقم DRV8301-69M مجموعة المحرك من شركة Texas Instruments Inc. التي تشتمل على محرك بوابة DRV8301 ثلاثي الطور مدمج مع منظم باك ومكبرات تحويل التيار الكهربائي ولوحة متحكم دقيق (MCU) يدعم InstaSPIN-FOC و InstaSPIN-MOTION.
على الرغم من تعقيد التصميم ، تنشأ الفوائد الرئيسية لـ BLDC من ميزات البناء الخاصة به. إنها تقدم عادةً كفاءة أعلى بنسبة 15٪ إلى 20٪ من الحلول المصقولة ، وتحتاج إلى صيانة أقل نظرًا لتصميمها عديم الفرشاة ، وتوفر منحنى عزم دوران مسطحًا في جميع السرعات المقدرة. في العديد من التطبيقات ، تم استبدال المحركات المصقولة بـ BLDCs بسبب التطورات الأخيرة في أشباه الموصلات التكنولوجيا ، وتحسينات في المغناطيس الدائم ، وزيادة الطلب على كفاءة أعلى.
سائقي DC
تستخدم BLDCs التبديل الإلكتروني ، مما يسمح بتحويل أفضل للتيار. إنه يؤدي إلى عزم دوران أكبر ، وتحكم دقيق في السرعة على نطاق واسع ، وتحسين أداء المحرك. نصف جسر أو نصف جسر H الدارة الكهربائية تم العثور عليه في معظم وحدات التحكم في المحركات BLDC. يحتوي تصميم الدائرة هذا ، على عكس جسر H ، على مفتاحين فقط: أحدهما مرتفع والآخر منخفض الترانزستور.
تتوفر محركات BLDC أحادية الطور وثنائية الطور وثلاثية الطور. النوع ذو الثلاث مراحل هو الأكثر شيوعًا. عدد لفات الجزء الثابت للمحرك يرتبط بعدد الأطوار ، لكن أقطاب الجزء المتحرك قد تكون أي عدد من الأزواج ، اعتمادًا على التطبيق.
أحد المكونات الأساسية للتحكم في BLDC هو السائق. إنه مضخم طاقة خرج الجهد الذي يحرك الجانب العالي والجانب المنخفض لدائرة نصف الجسر IGBT بوابات.
أحد الأمثلة على ذلك هو تكامل الطاقة 400-W BRD1167 و BRD1267 بريدجسويتش الدوائر المتكاملة التي توفر تيار طور RMS مستمر يبلغ 1.33 أمبير وتيار خرج FREDFET DC يبلغ 11.5 أ. وهي تعمل بالطاقة الذاتية وتأتي في حزمة تثبيت السطح InSOP-24C ، تمامًا مثل باقي عائلة BridgeSwitch. تدعم هذه الأجهزة جميع أساليب التحكم في المحركات والمحركات MCU ويمكنها تشغيل محركات متزامنة أو غير متزامنة أحادية الطور أو متعددة الأطوار. يتم تضمين حماية التيار الزائد والجهد الزائد / المنخفض والحرارة الزائدة في جميع الدوائر المتكاملة الخاصة بـ BridgeSwitch ، مما يبسط شهادة IEC 60335 و IEC 60730.
مثال آخر هو شركة Monolithic Power Systems Inc. MP6612D محرك ذو وجهين يستخدم جسر H. يمكنها تشغيل محرك DC ، ولف محرك متدرج ، وأحمال أخرى. أربعة قوة N- قناة الدوائر المتكاملة منخفضة المقاومة ومضخة شحن داخلية تخلق جهد محرك البوابة في جسر H. يتم استخدام دبابيس DIR و ENBL للتحكم في المخرجات.

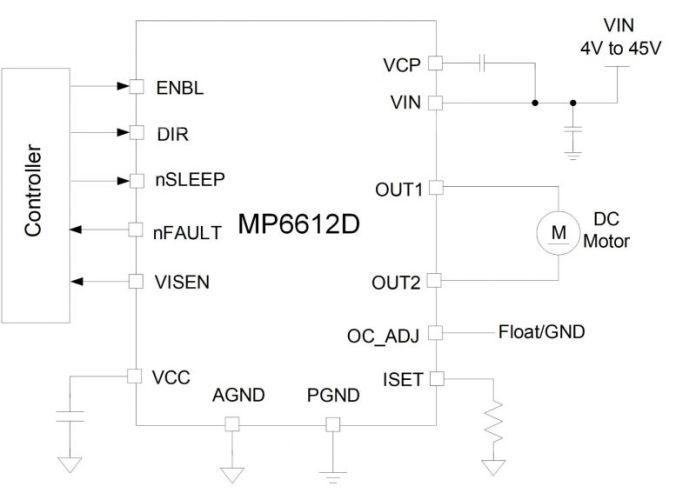
مخطط كتلة MP6612D (المصدر: Monolithic Power Systems Inc.)
أشباه الموصلات واسعة النطاق
تصميمات المحركات الكهربائية التي تستخرج أداءً أعلى من منصات أكثر إحكاما بشكل متزايد مطلوبة للتطبيقات الإلكترونية الناشئة. تكافح دوائر سائق المحرك التي تعتمد على MOSFETs و IGBTs الكلاسيكية من السيليكون للوفاء بالمعايير الجديدة. أصبح من الصعب على المصممين الحفاظ على فقدان الطاقة تحت السيطرة حيث تقترب تقنية السيليكون من الحدود النظرية لكثافة الطاقة ، وفولت الانهيار ، وتبديل التردد. تتمثل العواقب الرئيسية لهذه القيود في الكفاءة المنخفضة وقضايا الأداء الإضافية في درجات حرارة التشغيل المرتفعة ومعدلات التبديل.
تُستخدم أشباه الموصلات ذات فجوة النطاق العريض (WBG) مثل أجهزة كربيد السيليكون (SiC) ونيتريد الغاليوم (GaN) في التحكم في المحركات لأنها توفر تبديلًا أسرع قد يكون ضروريًا للمحركات التي تعمل على ترددات أساسية عالية وتتطلب تموجًا جيد التصفية. ومع ذلك ، فإن سرعات التحويل العالية التي حققتها أجهزة WBG ، مع توفير كفاءات تحويل أعلى ، تولد أيضًا اختلافات سريعة جدًا في الجهد تؤدي إلى معدلات تغيير الجهد العالي (dV / dt) التي يمكن أن تشدد على عزل لفات المحرك. لذلك ، فإن تطبيقات الطاقة الإلكترونية لها هدفان رئيسيان: إدارة المشكلات الحرارية وتقليل حجم النظام.
طورت الشركات المصنعة مثل Texas Instruments أجهزة طاقة متكاملة GaN تساعد في الحصول على أفضل أداء من أجهزة WBG. على سبيل المثال ، ملف إل إم جي 5200 يوفر مرحلة طاقة نصف جسر GaN 80-V مع وضع تحسين GaN FETs. يتكون الجهاز من اثنين من GaN FETs مدعومان بسائق GaN FET عالي التردد بترتيب نصف جسر.
تزود TI TIDA-00909 ، وهو تصميم مرجعي لمحركات محركات عالية التردد باستخدام عاكس ثلاثي الطور مع ثلاثة LMG5200s ، لتسهيل التصميم مع الجهاز. لتقييم الأداء البسيط ، يأتي TIDA-00909 بواجهة مناسبة للاتصال بمجموعة تطوير C2000 MCU LaunchPad.

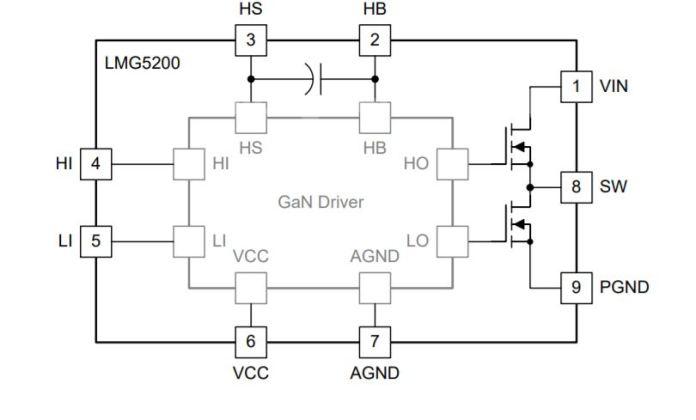
مخطط كتلة LMG5200 (المصدر: Texas Instruments Inc.)


لوحة الطاقة EPC9146. انقر للحصول على صورة أكبر. (المصدر: EPC)
مثال آخر هو EPC EPC9146 لوحة الطاقة ، التي تتضمن EPC2152 ePower Stage مع محرك بوابة مدمج باستخدام تقنية GaN IC الخاصة بـ EPC ، وتوفر جهدًا كهربيًا أقصى 80 فولت و 15 أمبير كحد أقصى تيار للإخراج. مع تردد PWM يصل إلى 3 ميجاهرتز ، يمكن تشغيله بأحمال كاملة. يوفر EPC9146 ميزات لتطبيقات محرك الطاقة ، مثل مرحلة الطاقة المتجانسة مع محرك بوابة مدمج ، وقضبان طاقة إضافية منظمة لمستلزمات التدبير المنزلي ، واستشعار الجهد ودرجة الحرارة ، والاستشعار الدقيق للتيار ، ووظائف الحماية.
يمكن إقران EPC9146 مع لوحات التزاوج من سلسلة EPC9147 للسماح للمستخدم بالتحكم في لوحة الطاقة مباشرة من خلال لوحة MCU الرئيسية ، والاستفادة من الموارد الحالية لأغراض التطوير السريع.
يتطلب تعقيد الروبوت أن يقوم السائق الصحيح بأداء وظيفته بشكل صحيح فيما يتعلق بالتطبيق الصناعي. تُستخدم أشباه الموصلات WBG في التحكم في المحركات لأنها تتيح التبديل السريع ، وهو أمر ضروري للمحركات التي تعمل بترددات أساسية عالية. بدلاً من إنشاء نظام دفع معقد ، يفضل المهندسون التركيز على ما يجعل تصميم أدواتهم مميزًا.
حول كفاءة تحويل الطاقة (EPC) أنظمة الطاقة المتجانسة