電気モーターは、電気エネルギーを機械エネルギーに変換するデバイスであり、関節式システムを動かすために使用できます。 電気モーターは、低速でかなりのトルクを生成でき、負荷範囲全体で非常に効率的である必要があります。 また、簡単な制御と駆動メカニズムも必要です。 より複雑な制御が必要ですが、ブラシレスDCモーター(BLDC)は、パフォーマンスが優れているため、ロボットアプリケーションに採用されています。
BLDCモーターは、製造コストが低いため、全面的に人気が高まっています。 特に、民生用ドローンや電動自転車の登場により、以前はハイエンドの産業用アプリケーションでのみ使用されていたBLDCモーターが広く採用されるようになりました。
これらのBLDCモーターアプリケーションを開発しているエンジニアは、モーター制御と同じように、過去XNUMX年間で変化しました。 今日のエンジニアは、複雑な推進システムを構築するのではなく、デバイスの設計を独自のものにすることに集中することを好みます。 エンジニアは、最小限のフォームファクタ、直感的なユーザーインターフェイス、リアルタイム機能、機能安全、クラウドでのデータ共有を備えた洗練されたデザインに注力しています。
制御問題
ロボット システムの重要な部分はモーター コントローラーです。 ロボット マニピュレータまたはロボット アームを操作するには、いくつかの制御戦略を使用できます。 の テクノロジー 利用方法とその実装方法は、マニピュレータのパフォーマンスに大きな影響を与える可能性があり、その結果、実行可能なアプリケーションの範囲に大きな影響を与える可能性があります。 一方、マニピュレーターと作動システムの機械的設計は、使用できる制御方式の種類に影響を与えます。
ロボットの仕事は通常、操作空間で述べられますが、制御アクションは、ロボットのさまざまな部分の動きの観点から関節空間で実行されます。 結果として、XNUMXつのタイプの制御スキームを検討することは合理的です。XNUMXつは共同スペース用で、もうXNUMXつは運用スペース用です。 コントローラー構造は、両方のスキームの閉ループ制御システムであり、モデルに対する潜在的な未知の影響に対する回復力と、ノイズなどの外乱効果の最小化という観点から、フィードバックの利点を活用します。
関節空間制御の問題は、マニピュレータの逆運動学を解いて、モーション要件を操作空間から関節空間に変換することを伴います。 次に、機械構造の動きが意図した動きに従うことができるように、制御スキームが作成されます。 それに比べて、運用空間での制御には、運動学的反転が閉ループシステムに組み込まれているはるかに高いレベルの計算の複雑さが必要です。
モーターの速度と方向を制御するには、使用中のオペレーティングシステム、およびモーターとアプリケーションのニーズに基づいたさまざまなアプローチと回路が必要です。 モーターコントローラーの目的は、電気モーターを手動または自動で操作できるようにすることです(開始-停止、反転、速度、ねじれ、および保護 電圧 過負荷)。
従来のモーターには、BLDCモーターにはない多くの利点があります。 BLDCおよびAC駆動の永久磁石同期モーター(PMSM)は、コンパクトなフォームファクターで必要な精度と高効率を提供できます。 さらに、ブラシタイプのDCモーターとAC誘導モーターは、より複雑なBLDCやPMSMとは異なり、接続と操作が簡単です。


DRV8301-69M-KITエンジンキットには、 3相 統合降圧型ドライバー レギュレーター および電流シャントアンプ。 クリックすると大きな画像が表示されます。 (出典: テキサス・インスツルメンツ社)
たとえば、BLDCは、センサーレスベクトル制御(フィールド指向制御、またはFOCとも呼ばれます)などの手法を使用して、優れた効率と排除の利点を提供します。 センサー ハードウェアにより、コストを削減し、信頼性を向上させます。 設計者にとっての問題は、センサーレスベクトル制御の実装が複雑であるため、その使用により開発時間が長くなり、コストが増加し、市場投入までの時間の予測を超える可能性があることです。
このジレンマを解決するために、設計者は次のような開発プラットフォームに目を向けることができます。 DRV8301-69M-キット Texas Instruments Inc.のエンジンキット。これには、降圧レギュレータと電流シャントアンプが統合されたDRV8301三相ゲートドライバと、InstaSPIN-FOCおよびInstaSPIN-MOTION対応のPiccolo TMS320F28069Mマイクロコントローラ(MCU)ボードが含まれています。
設計の複雑さにもかかわらず、BLDCの主な利点はその構造上の特徴から生じます。 これらは通常、ブラシ付きソリューションよりも15%から20%高い効率を提供し、ブラシレス設計のためメンテナンスが少なくて済み、すべての定格速度でフラットなトルク曲線を提供します。 多くのアプリケーションでは、最近の進歩により、ブラシ付きモーターがBLDCに置き換えられています。 半導体 技術、永久磁石の改良、そしてより高い効率への需要の高まり。
DCドライバー
BLDCは電子整流を使用しているため、電流スイッチングが向上します。 それは、より大きなトルク、広範囲にわたる正確な速度制御、および改善されたモーター性能につながります。 ハーフブリッジまたはハーフHブリッジ 回路 ほとんどのBLDCモーターコントローラーに見られます。 この回路設計は、Hブリッジとは異なり、XNUMXつのスイッチしかありません。XNUMXつはハイサイド、もうXNUMXつはローサイドです。 トランジスタ.
単相、二相、および三相BLDCモーターが利用可能です。 三相タイプが最も人気があります。 モーターの固定子の巻線数は相の数と相関関係がありますが、用途に応じて、回転子の極は任意の数のペアになる可能性があります。
BLDC 制御の基本コンポーネントはドライバーです。 ハーフブリッジ回路の大電流ハイサイドとローサイドを駆動する電圧出力パワーアンプです。 IGBT ゲート。
一例は、電力統合400-WBRD1167およびBRD1267です。 ブリッジスイッチ 1.33Aの連続RMS相電流と11.5AのFREDFETDC出力電流を提供するIC。これらはセルフパワーで、他のBridgeSwitchファミリと同様にInSOP-24C表面実装パッケージで提供されます。 これらのデバイスは、すべての主要なMCUおよびモーター制御方法をサポートし、単相または多相の高電圧同期または非同期モーターを操作できます。 過電流、過不足/不足電圧、および過熱保護がすべてのBridgeSwitch ICに含まれているため、IEC60335およびIEC60730認証が簡素化されます。
別の例は、Monolithic Power SystemsInc。の MP6612D Hブリッジを使用したリバーシブルモータードライバー。 DCモーター、ステッピングモーター巻線、その他の負荷を操作できます。 XNUMXつのNチャネル電力 MOSFET 内部チャージポンプは、Hブリッジにゲートドライバ電圧を生成します。 DIRピンとENBLピンは、出力を制御するために使用されます。

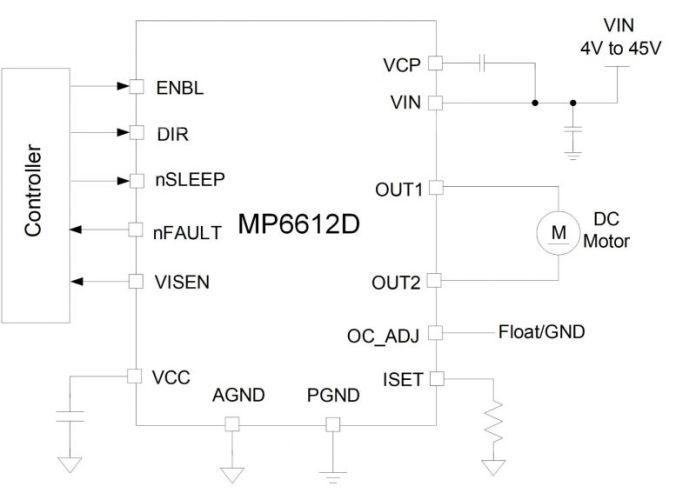
MP6612Dのブロック図(出典:Monolithic Power Systems Inc.)
ワイドバンドギャップ半導体
ますますコンパクトなプラットフォームからより高い性能を引き出す電気モーターの設計は、新しい電子アプリケーションに必要です。 従来のシリコンMOSFETとIGBTに依存するモータードライバー回路は、新しい基準を満たすのに苦労しています。 シリコン技術が電力密度、絶縁破壊電圧、およびスイッチング周波数の理論上の限界に近づくにつれて、設計者が電力損失を制御することはますます困難になっています。 これらの制約の主な結果は、高い動作温度とスイッチングレートでの効率の低下と追加のパフォーマンスの問題です。
炭化ケイ素(SiC)や窒化ガリウム(GaN)デバイスなどのワイドバンドギャップ(WBG)半導体は、高い基本周波数で動作し、十分にフィルタリングされたリップルを必要とするモーターに必要な高速スイッチングを提供するため、モーター制御に使用されます。 ただし、WBGデバイスによって達成される高いスイッチング速度は、より高い変換効率を提供する一方で、非常に高速な電圧変動を生成し、モーター巻線の絶縁にストレスを与える可能性のある高電圧変化率(dV / dt)をもたらします。 したがって、パワーエレクトロニクスアプリケーションには、熱の問題の管理とシステムサイズの縮小というXNUMXつの主な目的があります。
Texas Instrumentsのようなメーカーは、WBGデバイスから最高のパフォーマンスを得るのに役立つGaN統合パワーデバイスを開発しました。 たとえば、 LMG5200 エンハンスメントモードGaNFETを備えた80VGaNハーフブリッジパワーステージを提供します。 このデバイスは、ハーフブリッジ構成のXNUMXつの高周波GaNFETドライバによって電力が供給されるXNUMXつのGaNFETで構成されています。
TIは、デバイスを使用した設計を容易にするために、00909つのLMG5200を備えた三相インバーターを利用する高周波モータードライブのリファレンスデザインであるTIDA-00909を提供しています。 簡単なパフォーマンス評価のために、TIDA-2000には、CXNUMX MCULaunchPad開発キットに接続するための適切なインターフェイスが付属しています。

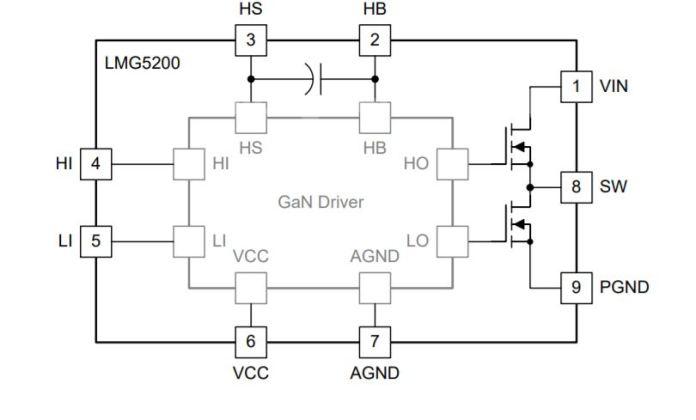
LMG5200のブロック図(出典:Texas Instruments Inc.)


EPC9146電源ボード。 クリックすると大きな画像が表示されます。 (出典:EPC)
別の例はEPCです EPC9146 EPC独自のGaNICテクノロジーを使用した統合ゲートドライバーを備えたEPC2152モノリシックePowerステージを組み込んだパワーボードは、最大80Vのデバイス電圧と15Aの最大出力電流を供給します。 最大3MHzのPWM周波数で、全負荷で実行できます。 EPC9146は、統合ゲートドライバを備えたモノリシックパワーステージ、ハウスキーピング電源用の調整された補助電源レール、電圧および温度検知、正確な電流検知、保護機能など、パワードライブアプリケーション向けの機能を提供します。
EPC9146はEPC9147シリーズの嵌合ボードと組み合わせて、ユーザーがメインストリームのMCUボードを介して直接電源ボードを制御できるようにし、既存のリソースを活用して迅速な開発を行うことができます。
ロボットは複雑であるため、産業用アプリケーションに適切に関連する機能を実行するには、適切なドライバーが必要です。 WBG半導体は、高い基本周波数で動作するモーターに必要な迅速なスイッチングを可能にするため、モーター制御に採用されています。 エンジニアは、複雑な推進システムを作成するのではなく、ガジェットの設計を際立たせるものに焦点を当てることを好みます。
Efficient Power Conversion (EPC) についてMonolithic Power SystemsPower IntegrationsTexas Instruments