Los motores eléctricos son dispositivos que transforman la energía eléctrica en energía mecánica, que pueden utilizarse para mover sistemas articulados. El motor eléctrico debe ser capaz de producir un par sustancial a bajas velocidades y ser extremadamente eficiente en todo el rango de carga. También requiere un sencillo mecanismo de control y conducción. Aunque requieren un control más complejo, los motores de CC sin escobillas (BLDC) están encontrando hogares en aplicaciones robóticas debido a su mejor rendimiento.
Los motores BLDC están ganando popularidad en todos los ámbitos gracias a sus menores costes de producción. La llegada de drones de consumo y bicicletas eléctricas, en particular, ha dado como resultado la adopción generalizada de motores BLDC, que anteriormente se usaban solo en aplicaciones industriales de alta gama.
Los ingenieros que están desarrollando estas aplicaciones de motores BLDC han cambiado en las últimas dos décadas, tanto como lo ha hecho el control de motores. El ingeniero de hoy prefiere concentrarse en lo que hace que el diseño de su dispositivo sea único en lugar de construir un sistema de propulsión complejo. Los ingenieros se están enfocando en diseños más elegantes con un factor de forma mínimo, interfaces de usuario intuitivas, capacidades en tiempo real, seguridad funcional e intercambio de datos en la nube.
El problema de control
Una parte importante de un sistema robótico es el controlador del motor. Se pueden utilizar varias estrategias de control para operar un manipulador robótico o un brazo robótico. El la tecnología utilizado y cómo se implementa puede tener un impacto considerable en el rendimiento del manipulador y, como resultado, en la gama de aplicaciones viables. El diseño mecánico del manipulador y el sistema de actuación, por otro lado, influyen en el tipo de esquema de control que se puede utilizar.
Si bien el trabajo del robot se establece típicamente en un espacio operativo, las acciones de control se implementan en el espacio articular en términos del movimiento de las diversas partes del robot. Como resultado, es razonable examinar dos tipos de esquemas de control: uno para el espacio común y otro para el espacio operativo. La estructura del controlador es un sistema de control de bucle cerrado en ambos esquemas para aprovechar los beneficios de la retroalimentación en términos de resistencia a posibles efectos desconocidos en el modelo y minimización de los efectos de perturbación como el ruido.
El problema del control del espacio articular implica resolver la cinemática inversa del manipulador para convertir los requisitos de movimiento del espacio operativo al espacio articular. A continuación, se crea el esquema de control para que el movimiento de la estructura mecánica pueda seguir el movimiento previsto. En comparación, el control en el espacio operacional requiere un nivel mucho más alto de complejidad computacional en el que la inversión cinemática se incorpora al sistema de circuito cerrado.
El sistema operativo en uso, así como varios enfoques y circuitos basados en el motor y las necesidades de la aplicación, son necesarios para controlar la velocidad y la dirección de los motores. El objetivo de un controlador de motor es poder operar un motor eléctrico de forma manual o automática (arranque-parada, inversión, velocidad, torsión y protección contra voltaje sobrecargas).
Los motores tradicionales tienen una serie de beneficios que los motores BLDC no tienen. Los motores síncronos de imanes permanentes (PMSM) impulsados por BLDC y CA pueden proporcionar la precisión requerida y la alta eficiencia en un factor de forma compacto. Además, los motores de CC con escobillas y los motores de inducción de CA son fáciles de conectar y operar, a diferencia de los BLDC y PMSM, que son más complejos.


El kit de motor DRV8301-69M-KIT incluye un Tres fases conductor con buck integrado organismo regulador y amplificadores en derivación de corriente. Haga clic para una imagen más grande. (Fuente: Texas Instruments Inc.)
Por ejemplo, los BLDC utilizan técnicas como el control vectorial sin sensores (también llamado control orientado al campo o FOC) que ofrecen una buena eficiencia y la ventaja de eliminar sensor hardware, reduciendo así el costo y mejorando la confiabilidad. El problema para los diseñadores es que el control vectorial sin sensores es complicado de implementar, por lo que su uso puede alargar el tiempo de desarrollo, agregar costos y posiblemente exceder los pronósticos de tiempo de comercialización.
Para resolver este dilema, los diseñadores pueden recurrir a plataformas de desarrollo como la DRV8301-69M-KIT kit de motor de Texas Instruments Inc. que incluye un controlador de compuerta trifásico DRV8301 integrado con un regulador reductor y amplificadores de derivación de corriente y una placa de microcontrolador (MCU) Piccolo TMS320F28069M habilitado para InstaSPIN-FOC e InstaSPIN-MOTION.
A pesar de la complejidad del diseño, los beneficios clave de un BLDC surgen de sus características de construcción. Por lo general, ofrecen una eficiencia entre un 15% y un 20% más alta que las soluciones cepilladas, necesitan menos mantenimiento debido a su diseño sin escobillas y ofrecen una curva de torsión plana a todas las velocidades nominales. En muchas aplicaciones, los motores con escobillas han sido reemplazados por BLDC debido a los avances recientes en Semiconductores tecnología, mejoras en imanes permanentes y mayor demanda de mayor eficiencia.
Controladores DC
Los BLDC utilizan conmutación electrónica, lo que permite una mejor conmutación de corriente. Conduce a un mayor par, un control de velocidad preciso en un amplio rango y un mejor rendimiento del motor. Medio puente o medio puente en H circuito se encuentra en la mayoría de los controladores de motor BLDC. Este diseño de circuito, a diferencia de un puente en H, tiene solo dos interruptores: uno de lado alto y otro de lado bajo Transistor.
Se encuentran disponibles motores BLDC monofásicos, bifásicos y trifásicos. El tipo trifásico es el más popular. El número de devanados del estator del motor se correlaciona con el número de fases, pero los polos del rotor pueden tener cualquier número de pares, según la aplicación.
Un componente fundamental del control BLDC es el conductor. Es un amplificador de potencia de salida de voltaje que controla el lado alto y el lado bajo de alta corriente del circuito de medio puente. IGBT puertas.
Un ejemplo son las integraciones de energía de 400 W BRD1167 y BRD1267 Interruptor de puente Circuitos integrados que proporcionan una corriente de fase RMS continua de 1.33 A y una corriente de salida CC FREDFET de 11.5 A. Son autoalimentados y vienen en el paquete de montaje en superficie InSOP-24C, al igual que el resto de la familia BridgeSwitch. Estos dispositivos son compatibles con todos los principales métodos de control de motores y MCU y pueden operar motores síncronos o asíncronos de alto voltaje monofásicos o multifásicos. Todos los circuitos integrados BridgeSwitch incluyen protección contra sobrecorriente, sobretensión / subtensión y sobretemperatura, lo que simplifica la certificación IEC 60335 e IEC 60730.
Otro ejemplo es el de Monolithic Power Systems Inc. MP6612D Controlador de motor reversible que utiliza un puente en H. Puede operar un motor de CC, un devanado de motor paso a paso y otras cargas. Potencia de cuatro canales N mosfets y una bomba de carga interna crean los voltajes del controlador de la compuerta en el puente H. Los pines DIR y ENBL se utilizan para controlar las salidas.

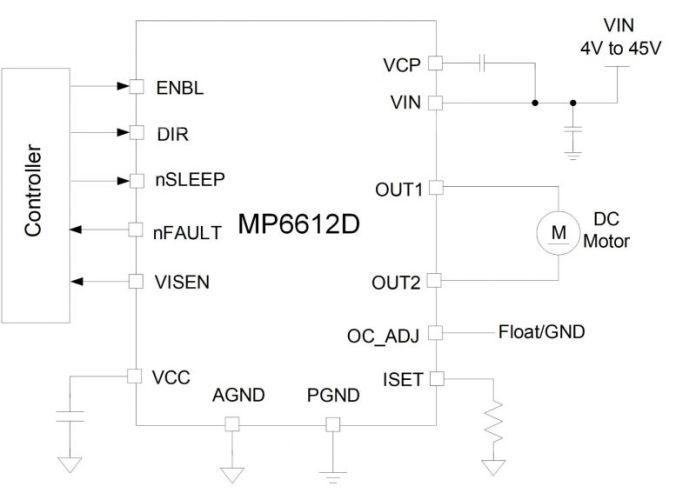
Diagrama de bloques MP6612D (Fuente: Monolithic Power Systems Inc.)
Semiconductores de banda ancha
Los diseños de motores eléctricos que extraen un mayor rendimiento de plataformas cada vez más compactas son necesarios para aplicaciones electrónicas emergentes. Los circuitos de controlador de motor que se basan en los MOSFET e IGBT de silicio clásicos están luchando por cumplir con los nuevos criterios. Se está volviendo más difícil para los diseñadores mantener las pérdidas de energía bajo control a medida que la tecnología de silicio se acerca a los límites teóricos de densidad de energía, voltaje de ruptura y frecuencia de conmutación. Las principales consecuencias de estas limitaciones son la reducción de la eficiencia y problemas de rendimiento adicionales a altas temperaturas de funcionamiento y velocidades de conmutación.
Los semiconductores de banda ancha amplia (WBG), como los dispositivos de carburo de silicio (SiC) y nitruro de galio (GaN), se utilizan en el control de motores porque proporcionan una conmutación más rápida que puede ser necesaria para motores que operan a altas frecuencias fundamentales y requieren una ondulación bien filtrada. Sin embargo, las altas velocidades de conmutación alcanzadas por los dispositivos WBG, si bien ofrecen mayores eficiencias de conversión, también generan variaciones de voltaje muy rápidas que dan como resultado tasas de cambio de alto voltaje (dV / dt) que pueden estresar el aislamiento de los devanados del motor. Las aplicaciones de electrónica de potencia, por tanto, tienen dos objetivos principales: gestionar los problemas térmicos y reducir el tamaño del sistema.
Fabricantes como Texas Instruments han desarrollado dispositivos de alimentación integrados de GaN que ayudan a obtener el mejor rendimiento de los dispositivos WBG. Por ejemplo, el LMG5200 proporciona una etapa de potencia de medio puente de 80 V GaN con FET de GaN en modo de mejora. El dispositivo consta de dos FET de GaN alimentados por un controlador FET de GaN de alta frecuencia en una disposición de medio puente.
TI suministra el TIDA-00909, un diseño de referencia para accionamientos de motor de alta frecuencia que utiliza un inversor trifásico con tres LMG5200, para facilitar el diseño con el dispositivo. Para una evaluación de rendimiento simple, el TIDA-00909 viene con una interfaz adecuada para conectarse a un kit de desarrollo C2000 MCU LaunchPad.

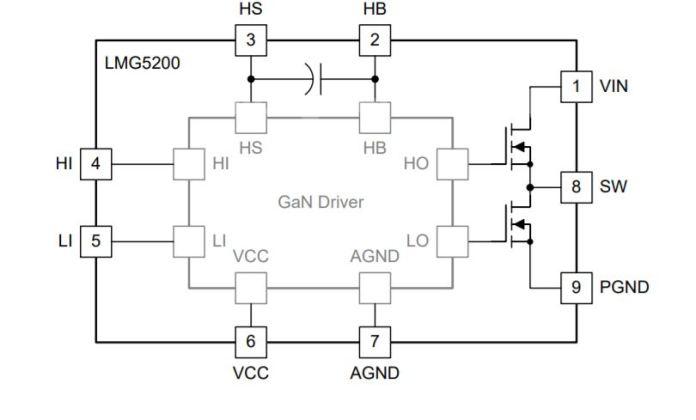
Diagrama de bloques del LMG5200 (Fuente: Texas Instruments Inc.)


Tarjeta de potencia EPC9146. Haga clic para una imagen más grande. (Fuente: EPC)
Otro ejemplo es el de EPC EPC9146 placa de alimentación, que incorpora el ePower Stage monolítico EPC2152 con un controlador de compuerta integrado que utiliza la tecnología GaN IC patentada de EPC, y ofrece un voltaje máximo de dispositivo de 80 V y una corriente de salida máxima de 15 A. Con una frecuencia PWM de hasta 3 MHz, puede funcionar a plena carga. El EPC9146 ofrece características para aplicaciones de accionamiento de potencia, como una etapa de potencia monolítica con un controlador de puerta integrado, rieles de potencia auxiliares regulados para suministros de limpieza, detección de voltaje y temperatura, detección de corriente precisa y funciones de protección.
El EPC9146 se puede emparejar con placas de acoplamiento de la serie EPC9147 para permitir al usuario controlar la placa de alimentación directamente a través de una placa MCU convencional, aprovechando los recursos existentes para fines de desarrollo rápido.
La complejidad de un robot requiere del controlador adecuado para realizar su función correctamente relacionada con la aplicación industrial. Los semiconductores WBG se emplean en el control de motores porque permiten una conmutación más rápida, que es necesaria para motores que operan a altas frecuencias fundamentales. En lugar de crear un complicado sistema de propulsión, los ingenieros prefieren centrarse en lo que hace que el diseño de su dispositivo sea distintivo.
acerca de Conversión de energía eficiente (EPC)Sistemas de energía monolíticosIntegraciones de energíaTexas Instruments