มอเตอร์ไฟฟ้าเป็นอุปกรณ์ที่แปลงพลังงานไฟฟ้าเป็นพลังงานกล ซึ่งอาจใช้ในการเคลื่อนย้ายระบบข้อต่อ มอเตอร์ไฟฟ้าต้องสามารถผลิตแรงบิดได้มากที่ความเร็วต่ำและมีประสิทธิภาพสูงสุดตลอดช่วงโหลด นอกจากนี้ยังต้องมีการควบคุมและกลไกการขับขี่ที่ตรงไปตรงมา แม้ว่าพวกเขาต้องการการควบคุมที่ซับซ้อนมากขึ้น แต่มอเตอร์กระแสตรงไร้แปรงถ่าน (BLDCs) กำลังค้นหาที่อยู่อาศัยในการใช้งานหุ่นยนต์เนื่องจากประสิทธิภาพที่ดีขึ้น
มอเตอร์ BLDC กำลังได้รับความนิยมทั่วทั้งกระดานด้วยต้นทุนการผลิตที่ต่ำลง โดยเฉพาะอย่างยิ่งการมาถึงของโดรนสำหรับผู้บริโภคและ e-bikes ส่งผลให้มีการนำมอเตอร์ BLDC ไปใช้อย่างแพร่หลาย ซึ่งก่อนหน้านี้เคยใช้ในอุตสาหกรรมระดับไฮเอนด์เท่านั้น
วิศวกรที่กำลังพัฒนาการใช้งานมอเตอร์ BLDC เหล่านี้มีการเปลี่ยนแปลงในช่วงสองทศวรรษที่ผ่านมา มากเท่ากับการควบคุมมอเตอร์ วิศวกรในปัจจุบันชอบที่จะให้ความสำคัญกับสิ่งที่ทำให้การออกแบบอุปกรณ์ของตนมีเอกลักษณ์มากกว่าการสร้างระบบขับเคลื่อนที่ซับซ้อน วิศวกรกำลังมุ่งเน้นไปที่การออกแบบที่โฉบเฉี่ยวขึ้นด้วยปัจจัยรูปแบบที่น้อยที่สุด ส่วนต่อประสานผู้ใช้ที่ใช้งานง่าย ความสามารถแบบเรียลไทม์ ความปลอดภัยในการใช้งาน และการแบ่งปันข้อมูลในระบบคลาวด์
ปัญหาการควบคุม
ส่วนสำคัญของระบบหุ่นยนต์คือตัวควบคุมมอเตอร์ สามารถใช้กลยุทธ์การควบคุมหลายอย่างเพื่อควบคุมหุ่นยนต์หรือแขนหุ่นยนต์ได้ ที่ เทคโนโลยี การใช้งานและวิธีการนำไปใช้อาจส่งผลกระทบอย่างมากต่อประสิทธิภาพของเครื่องมือจัดการและเป็นผลให้ขอบเขตของแอปพลิเคชันทำงานได้ ในทางกลับกัน การออกแบบทางกลของหุ่นบังคับและระบบสั่งงานจะมีอิทธิพลต่อประเภทของแผนการควบคุมที่อาจใช้
แม้ว่าโดยทั่วไปงานของหุ่นยนต์จะระบุไว้ในพื้นที่ปฏิบัติงาน การควบคุมจะดำเนินการในพื้นที่ร่วมในแง่ของการเคลื่อนที่ของส่วนต่างๆ ของหุ่นยนต์ ดังนั้นจึงควรตรวจสอบแผนการควบคุมสองประเภท: แบบหนึ่งสำหรับพื้นที่ร่วมและอีกแบบสำหรับพื้นที่ปฏิบัติการ โครงสร้างตัวควบคุมเป็นระบบควบคุมแบบวงปิดในทั้งสองรูปแบบเพื่อใช้ประโยชน์จากผลป้อนกลับในแง่ของความยืดหยุ่นต่อผลกระทบที่อาจเกิดขึ้นที่ไม่ทราบรูปแบบต่อแบบจำลอง และลดผลกระทบจากการรบกวน เช่น เสียงรบกวนให้น้อยที่สุด
ปัญหาการควบคุมพื้นที่ร่วมทำให้เกิดการแก้ปัญหาจลนศาสตร์ผกผันของตัวจัดการเพื่อแปลงความต้องการการเคลื่อนไหวจากการปฏิบัติงานเป็นพื้นที่ร่วม จากนั้นจึงสร้างรูปแบบการควบคุมเพื่อให้การเคลื่อนที่ของโครงสร้างทางกลเป็นไปตามการเคลื่อนไหวที่ตั้งใจไว้ ในการเปรียบเทียบ การควบคุมในพื้นที่ปฏิบัติการจำเป็นต้องมีระดับความซับซ้อนในการคำนวณที่สูงขึ้นมาก ซึ่งการผกผันของจลนศาสตร์ถูกรวมไว้ในระบบวงปิด
ระบบปฏิบัติการที่ใช้งานตลอดจนแนวทางและวงจรต่างๆ ตามความต้องการของมอเตอร์และการใช้งาน จำเป็นสำหรับการควบคุมความเร็วและทิศทางของมอเตอร์ จุดมุ่งหมายของตัวควบคุมมอเตอร์คือเพื่อให้สามารถสั่งงานมอเตอร์ไฟฟ้าแบบแมนนวลหรือแบบอัตโนมัติได้ (สตาร์ท-หยุด ผกผัน ความเร็ว แรงบิด และการป้องกัน แรงดันไฟฟ้า เกินพิกัด)
มอเตอร์แบบดั้งเดิมมีประโยชน์หลายประการที่มอเตอร์ BLDC ไม่มี มอเตอร์ซิงโครนัสแบบแม่เหล็กถาวรที่ขับเคลื่อนด้วย BLDC และ AC (PMSM) สามารถให้ความแม่นยำที่จำเป็นและมีประสิทธิภาพสูงในรูปแบบกะทัดรัด นอกจากนี้ มอเตอร์ DC แบบแปรงและมอเตอร์เหนี่ยวนำกระแสสลับยังเชื่อมต่อและใช้งานได้ง่าย ต่างจาก BLDC และ PMSM ที่มีความซับซ้อนมากกว่า


ชุดเครื่องยนต์ DRV8301-69M-KIT ประกอบด้วย a สามเฟส ไดรเวอร์พร้อมเจ้าชู้ในตัว เครื่องควบคุม และเครื่องขยายกระแสสลับ คลิกเพื่อดูภาพขนาดใหญ่ (ที่มา: Texas Instruments Inc.)
ตัวอย่างเช่น BLDCs ใช้เทคนิคต่างๆ เช่น การควบคุมเวกเตอร์แบบไม่มีเซ็นเซอร์ (หรือที่เรียกว่าการควบคุมเชิงสนาม หรือ FOC) ที่ให้ประสิทธิภาพที่ดีและข้อดีของการกำจัด เซ็นเซอร์ ฮาร์ดแวร์ ซึ่งช่วยลดต้นทุนและเพิ่มความน่าเชื่อถือ ปัญหาสำหรับนักออกแบบคือการควบคุมเวกเตอร์แบบไม่ใช้เซ็นเซอร์นั้นซับซ้อนในการนำไปใช้ ดังนั้นการใช้งานจึงสามารถยืดเวลาการพัฒนา เพิ่มต้นทุน และอาจเกินการคาดการณ์เวลาออกสู่ตลาด
เพื่อแก้ปัญหาภาวะที่กลืนไม่เข้าคายไม่ออกนี้ นักออกแบบสามารถหันไปใช้แพลตฟอร์มการพัฒนาเช่น DRV8301-69M-KIT ชุดเครื่องยนต์จาก Texas Instruments Inc. ที่มีไดรเวอร์เกทสามเฟส DRV8301 ที่รวมเข้ากับตัวควบคุมบั๊กและแอมพลิฟายเออร์แบบแบ่งกระแส และบอร์ด Piccolo TMS320F28069M ไมโครคอนโทรลเลอร์ (MCU) ที่เปิดใช้งาน InstaSPIN-FOC และ InstaSPIN-MOTION
แม้จะมีความซับซ้อนในการออกแบบ แต่ประโยชน์หลักของ BLDC ก็มาจากคุณสมบัติการก่อสร้าง โดยทั่วไปแล้วจะมีประสิทธิภาพที่สูงกว่าโซลูชันแบบมีแปรง 15% ถึง 20% ต้องการการบำรุงรักษาน้อยลงเนื่องจากการออกแบบที่ไม่ใช้แปรง และให้เส้นโค้งแรงบิดแบนที่ความเร็วที่กำหนดทั้งหมด ในการใช้งานจำนวนมาก มอเตอร์แบบมีแปรงถ่านได้ถูกแทนที่ด้วย BLDC เนื่องจากความก้าวหน้าล่าสุดใน สารกึ่งตัวนำ เทคโนโลยี การปรับปรุงแม่เหล็กถาวร และความต้องการที่เพิ่มขึ้นสำหรับประสิทธิภาพที่สูงขึ้น
ไดรเวอร์ DC
BLDCs ใช้การสับเปลี่ยนทางอิเล็กทรอนิกส์ ซึ่งช่วยให้สลับกระแสได้ดีขึ้น มันนำไปสู่แรงบิดที่มากขึ้น การควบคุมความเร็วที่แม่นยำในช่วงกว้าง และปรับปรุงประสิทธิภาพของมอเตอร์ ครึ่งสะพานหรือครึ่งสะพาน H วงจรไฟฟ้า พบได้ในตัวควบคุมมอเตอร์ BLDC ส่วนใหญ่ การออกแบบวงจรนี้ไม่เหมือนกับ H-bridge ที่มีสวิตช์เพียงสองตัว: ด้านสูงและด้านต่ำ ทรานซิสเตอร์.
มีมอเตอร์ BLDC แบบเฟสเดียว สองเฟส และสามเฟสให้เลือก ประเภทสามเฟสเป็นที่นิยมมากที่สุด จำนวนขดลวดของสเตเตอร์มอเตอร์สัมพันธ์กับจำนวนเฟส แต่เสาโรเตอร์อาจมีจำนวนคู่เท่าใดก็ได้ ขึ้นอยู่กับการใช้งาน
องค์ประกอบพื้นฐานของการควบคุม BLDC คือไดรเวอร์ เป็นเครื่องขยายกำลังแรงดันไฟฟ้าเอาท์พุตที่ขับเคลื่อนด้านสูงและต่ำกระแสสูงของวงจรฮาล์ฟบริดจ์ IGBT ประตู
ตัวอย่างหนึ่งคือ Power Integrations 400-W BRD1167 และ BRD1267 บริดจ์สวิตช์ ไอซีที่ให้กระแสเฟส RMS ต่อเนื่องที่ 1.33 A และกระแสไฟขาออก FREDFET DC ที่ 11.5 A เป็นแบบขับเคลื่อนด้วยตัวเองและมาในแพ็คเกจติดตั้งบนพื้นผิว InSOP-24C เช่นเดียวกับผลิตภัณฑ์อื่นๆ ในตระกูล BridgeSwitch อุปกรณ์เหล่านี้รองรับ MCU หลักและวิธีการควบคุมมอเตอร์ทั้งหมด และสามารถใช้งานมอเตอร์ซิงโครนัสแรงดันสูงแบบซิงโครนัสหรือแบบอะซิงโครนัสแบบเฟสเดียวหรือหลายเฟสได้ การป้องกันกระแสไฟเกิน แรงดันไฟเกิน/แรงดันต่ำ และอุณหภูมิเกินรวมอยู่ใน BridgeSwitch IC ทั้งหมด ซึ่งทำให้การรับรอง IEC 60335 และ IEC 60730 ง่ายขึ้น
อีกตัวอย่างหนึ่งคือ Monolithic Power Systems Inc.'s เอ็มพี6612ดี ตัวขับมอเตอร์แบบย้อนกลับที่ใช้สะพาน H สามารถใช้มอเตอร์กระแสตรง สเต็ปเปอร์มอเตอร์ที่คดเคี้ยว และโหลดอื่นๆ พลังงาน N-channel สี่ช่อง มอสเฟต และปั๊มประจุภายในจะสร้างแรงดันไฟฟ้าของตัวขับเกทในสะพาน H พิน DIR และ ENBL ใช้เพื่อควบคุมเอาต์พุต

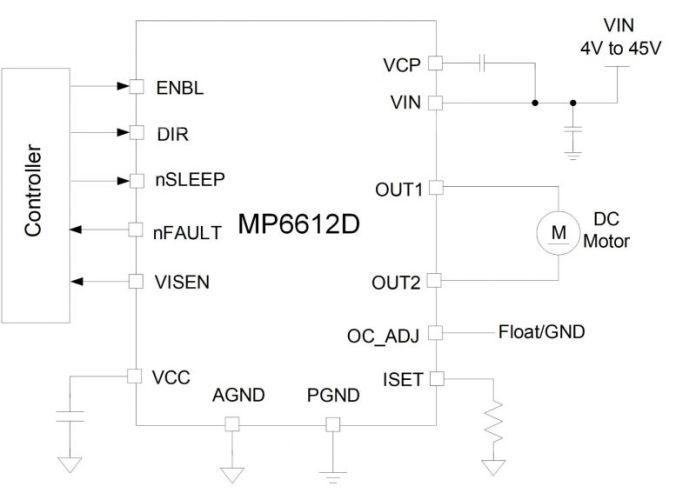
แผนภาพบล็อก MP6612D (ที่มา: Monolithic Power Systems Inc.)
เซมิคอนดักเตอร์แบบวงกว้าง
การออกแบบมอเตอร์ไฟฟ้าที่ดึงประสิทธิภาพที่สูงขึ้นจากแพลตฟอร์มที่มีขนาดกะทัดรัดมากขึ้นเป็นสิ่งจำเป็นสำหรับการใช้งานอิเล็กทรอนิกส์ที่เกิดขึ้นใหม่ วงจรขับมอเตอร์ที่ใช้ MOSFET และ IGBT แบบซิลิกอนแบบคลาสสิกกำลังดิ้นรนเพื่อให้เป็นไปตามเกณฑ์ใหม่ เป็นเรื่องยากมากขึ้นสำหรับนักออกแบบที่จะควบคุมการสูญเสียพลังงานภายใต้การควบคุม เนื่องจากเทคโนโลยีซิลิกอนเข้าใกล้ขีดจำกัดทางทฤษฎีสำหรับความหนาแน่นของพลังงาน แรงดันพังทลาย และความถี่ในการเปลี่ยน ผลที่ตามมาหลักของข้อจำกัดเหล่านี้คือประสิทธิภาพที่ลดลงและปัญหาด้านประสิทธิภาพเพิ่มเติมที่อุณหภูมิการทำงานสูงและอัตราการเปลี่ยน
เซมิคอนดักเตอร์ Wide-bandgap (WBG) เช่น อุปกรณ์ซิลิกอนคาร์ไบด์ (SiC) และแกลเลียมไนไตรด์ (GaN) ใช้ในการควบคุมมอเตอร์ เนื่องจากมีสวิตช์ที่เร็วกว่าซึ่งอาจจำเป็นสำหรับมอเตอร์ที่ทำงานที่ความถี่พื้นฐานสูงและต้องการการกระเพื่อมที่กรองอย่างดี อย่างไรก็ตาม ความเร็วในการเปลี่ยนสูงที่ทำได้โดยอุปกรณ์ WBG ในขณะที่ให้ประสิทธิภาพการแปลงที่สูงขึ้น ยังสร้างรูปแบบแรงดันไฟฟ้าที่รวดเร็วมาก ซึ่งส่งผลให้อัตราการเปลี่ยนแปลงของแรงดันสูง (dV/dt) สามารถสร้างความเครียดให้กับฉนวนของขดลวดมอเตอร์ได้ การใช้งานไฟฟ้าและอิเล็กทรอนิกส์จึงมีวัตถุประสงค์หลักสองประการ: การจัดการปัญหาด้านความร้อนและการลดขนาดระบบ
ผู้ผลิตอย่าง Texas Instruments ได้พัฒนาอุปกรณ์จ่ายไฟแบบบูรณาการของ GaN ที่ช่วยให้ได้ประสิทธิภาพที่ดีที่สุดจากอุปกรณ์ WBG ตัวอย่างเช่น LMG5200 จัดเตรียมพาวเวอร์สเตจแบบฮาล์ฟบริดจ์ 80-V GaN พร้อม GaN FET ในโหมดเพิ่มประสิทธิภาพ อุปกรณ์ประกอบด้วย GaN FET สองชุดที่ขับเคลื่อนโดยไดรเวอร์ GaN FET ความถี่สูงหนึ่งตัวในการจัดเรียงแบบฮาล์ฟบริดจ์
TI จัดหา TIDA-00909 ซึ่งเป็นการออกแบบอ้างอิงสำหรับมอเตอร์ไดรฟ์ความถี่สูงโดยใช้อินเวอร์เตอร์สามเฟสพร้อม LMG5200 สามตัว เพื่อให้การออกแบบด้วยอุปกรณ์ง่ายขึ้น สำหรับการประเมินประสิทธิภาพอย่างง่าย TIDA-00909 มาพร้อมกับอินเทอร์เฟซที่เหมาะสมสำหรับการเชื่อมต่อกับชุดพัฒนา C2000 MCU LaunchPad

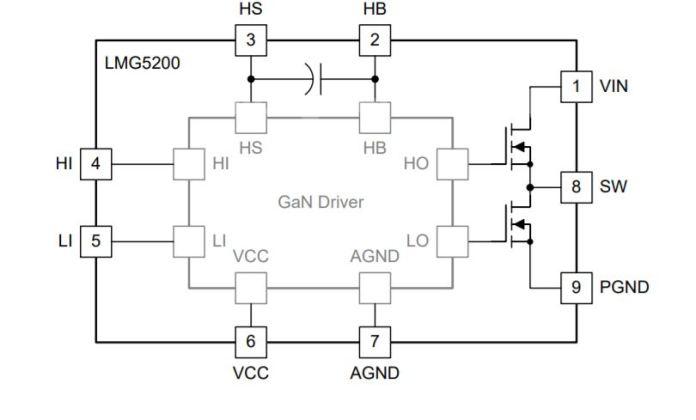
บล็อกไดอะแกรม LMG5200 (ที่มา: Texas Instruments Inc.)


บอร์ดจ่ายไฟ EPC9146 คลิกเพื่อดูภาพขนาดใหญ่ (ที่มา: EPC)
อีกตัวอย่างหนึ่งคือ EPC's EPC9146 บอร์ดพลังงาน ซึ่งประกอบด้วย EPC2152 monolithic ePower Stage กับไดรเวอร์เกทในตัวโดยใช้เทคโนโลยี GaN IC ที่เป็นกรรมสิทธิ์ของ EPC และให้แรงดันไฟฟ้าอุปกรณ์สูงสุด 80-V และกระแสไฟขาออกสูงสุด 15-A ด้วยความถี่ PWM สูงถึง 3 MHz มันสามารถทำงานที่โหลดเต็มที่ EPC9146 มีคุณสมบัติสำหรับการใช้งานแบบขับเคลื่อนด้วยกำลังไฟฟ้า เช่น แท่นจ่ายกำลังไฟฟ้าแบบเสาหินพร้อมตัวขับเกทในตัว รางไฟเสริมที่มีการควบคุมสำหรับอุปกรณ์ทำความสะอาด การตรวจจับแรงดันและอุณหภูมิ การตรวจจับกระแสไฟที่แม่นยำ และฟังก์ชันป้องกัน
EPC9146 สามารถจับคู่กับบอร์ดผสมพันธุ์ EPC9147 series เพื่อให้ผู้ใช้สามารถควบคุมบอร์ดพลังงานได้โดยตรงผ่านบอร์ด MCU หลัก โดยใช้ประโยชน์จากทรัพยากรที่มีอยู่เพื่อวัตถุประสงค์ในการพัฒนาอย่างรวดเร็ว
ความซับซ้อนของหุ่นยนต์ต้องการไดรเวอร์ที่เหมาะสมเพื่อทำหน้าที่อย่างเหมาะสมซึ่งเกี่ยวข้องกับงานอุตสาหกรรม เซมิคอนดักเตอร์ของ WBG ใช้ในการควบคุมมอเตอร์เพราะช่วยให้เปลี่ยนได้เร็วขึ้น ซึ่งจำเป็นสำหรับมอเตอร์ที่ทำงานที่ความถี่พื้นฐานสูง แทนที่จะสร้างระบบขับเคลื่อนที่ซับซ้อน วิศวกรชอบให้ความสำคัญกับสิ่งที่ทำให้การออกแบบแกดเจ็ตของตนโดดเด่น
เกี่ยวกับ Efficient Power Conversion (EPC)Monolithic Power SystemsPower IntegrationsTexas Instruments