Elektromotoren sind Geräte, die elektrische Energie in mechanische Energie umwandeln, die zum Bewegen von Gelenksystemen verwendet werden kann. Der Elektromotor muss in der Lage sein, bei niedrigen Drehzahlen ein hohes Drehmoment zu erzeugen und über den gesamten Lastbereich äußerst effizient zu sein. Es erfordert auch einen einfachen Steuerungs- und Antriebsmechanismus. Obwohl sie eine komplexere Steuerung erfordern, finden bürstenlose DC-Motoren (BLDCs) aufgrund ihrer besseren Leistung Einzug in Roboteranwendungen.
BLDC-Motoren erfreuen sich aufgrund ihrer geringeren Produktionskosten auf breiter Front wachsender Beliebtheit. Insbesondere die Einführung von Consumer-Drohnen und E-Bikes hat zu einer breiten Akzeptanz von BLDC-Motoren geführt, die zuvor nur in High-End-Industrieanwendungen eingesetzt wurden.
Ingenieure, die diese BLDC-Motoranwendungen entwickeln, haben sich in den letzten zwei Jahrzehnten ebenso verändert wie die Motorsteuerung. Der Ingenieur von heute konzentriert sich lieber auf das, was sein Gerätedesign einzigartig macht, als ein komplexes Antriebssystem zu konstruieren. Ingenieure konzentrieren sich auf schlankere Designs mit minimalem Formfaktor, intuitiven Benutzeroberflächen, Echtzeitfähigkeiten, funktionaler Sicherheit und Datenfreigabe in der Cloud.
Das Kontrollproblem
Ein wesentlicher Teil eines Robotersystems ist die Motorsteuerung. Für den Betrieb eines Robotermanipulators oder Roboterarms können mehrere Steuerungsstrategien verwendet werden. Der Technologie Der Einsatz und die Art und Weise seiner Implementierung können einen erheblichen Einfluss auf die Leistung des Manipulators und damit auf die Bandbreite realisierbarer Anwendungen haben. Der mechanische Aufbau des Manipulators und des Betätigungssystems wiederum beeinflussen die Art des Steuerungsschemas, das verwendet werden kann.
Während der Job des Roboters typischerweise in einem Arbeitsraum angegeben wird, werden die Steueraktionen im Gelenkraum in Bezug auf die Bewegung der verschiedenen Teile des Roboters implementiert. Daher ist es sinnvoll, zwei Arten von Kontrollschemata zu untersuchen: eines für den gemeinsamen Raum und ein weiteres für den Betriebsraum. Die Reglerstruktur ist in beiden Schemata ein geschlossenes Regelsystem, um die Vorteile der Rückkopplung in Bezug auf die Widerstandsfähigkeit gegen potenziell unbekannte Auswirkungen auf das Modell und die Minimierung von Störeffekten wie Rauschen zu nutzen.
Das Problem der Gelenkraumsteuerung beinhaltet die Lösung der inversen Kinematik des Manipulators, um die Bewegungsanforderungen vom Betriebs- in den Gelenkraum umzuwandeln. Das Steuerschema wird dann erstellt, damit die Bewegung der mechanischen Struktur der beabsichtigten Bewegung folgen kann. Im Vergleich dazu erfordert die Regelung im Betriebsraum einen weitaus höheren Rechenaufwand, bei dem die kinematische Inversion in das geschlossene System integriert wird.
Zur Steuerung von Drehzahl und Drehrichtung der Motoren sind das verwendete Betriebssystem sowie verschiedene Ansätze und Schaltungen je nach Motor- und Anwendungsbedarf erforderlich. Ziel eines Motorcontrollers ist es, einen Elektromotor manuell oder automatisch betreiben zu können (Start-Stopp, Inversion, Drehzahl, Torsion und Schutz gegen Spannung Überlastungen).
Herkömmliche Motoren haben eine Reihe von Vorteilen, die BLDC-Motoren nicht haben. BLDC- und AC-betriebene Permanentmagnet-Synchronmotoren (PMSMs) können die erforderliche Präzision und hohe Effizienz in einem kompakten Formfaktor bieten. Darüber hinaus sind Bürsten-DC-Motoren und AC-Induktionsmotoren einfach anzuschließen und zu betreiben, im Gegensatz zu BLDCs und PMSMs, die komplexer sind.


Das DRV8301-69M-KIT Motorkit beinhaltet ein Drei Phasen Fahrer mit integriertem Bock Regler und Strom-Shunt-Verstärker. Klicken Sie für ein größeres Bild. (Quelle: Texas Instruments Inc.)
BLDCs verwenden beispielsweise Techniken wie die sensorlose Vektorsteuerung (auch als feldorientierte Steuerung oder FOC bezeichnet), die eine gute Effizienz und den Vorteil der Eliminierung bieten Sensor Hardware, wodurch die Kosten gesenkt und die Zuverlässigkeit verbessert werden. Das Problem für Entwickler besteht darin, dass die sensorlose Vektorsteuerung kompliziert zu implementieren ist, sodass ihre Verwendung die Entwicklungszeit verlängern, die Kosten erhöhen und möglicherweise die Markteinführungsprognosen überschreiten kann.
Um dieses Dilemma zu lösen, können sich Designer an Entwicklungsplattformen wie die DRV8301-69M-KIT Engine-Kit von Texas Instruments Inc., das einen dreiphasigen Gate-Treiber DRV8301 mit integriertem Abwärtsregler und Strom-Shunt-Verstärkern sowie eine InstaSPIN-FOC- und InstaSPIN-MOTION-fähige Piccolo TMS320F28069M-Mikrocontroller-Platine (MCU) enthält.
Trotz der Komplexität des Designs ergeben sich die wichtigsten Vorteile eines BLDC aus seinen Konstruktionsmerkmalen. Sie bieten in der Regel einen um 15 bis 20 % höheren Wirkungsgrad als Lösungen mit Bürsten, benötigen aufgrund ihres bürstenlosen Designs weniger Wartung und liefern bei allen Nenndrehzahlen eine flache Drehmomentkurve. In vielen Anwendungen wurden Bürstenmotoren aufgrund der jüngsten Fortschritte bei BLDCs ersetzt Halbleiter Technologie, Verbesserungen bei Permanentmagneten und erhöhte Nachfrage nach höherer Effizienz.
DC-Treiber
BLDCs verwenden eine elektronische Kommutierung, die eine bessere Stromumschaltung ermöglicht. Dies führt zu einem höheren Drehmoment, einer genauen Drehzahlregelung über einen weiten Bereich und einer verbesserten Motorleistung. Eine Halbbrücke oder Halb-H-Brücke Schaltung ist in den meisten BLDC-Motorsteuerungen enthalten. Dieses Schaltungsdesign hat im Gegensatz zu einer H-Brücke nur zwei Schalter: einen High-Side und einen Low-Side Transistor.
Es stehen einphasige, zweiphasige und dreiphasige BLDC-Motoren zur Verfügung. Der dreiphasige Typ ist der beliebteste. Die Anzahl der Wicklungen des Motorstators korreliert mit der Anzahl der Phasen, aber die Rotorpole können je nach Anwendung eine beliebige Anzahl von Paaren sein.
Eine grundlegende Komponente der BLDC-Steuerung ist der Treiber. Es handelt sich um einen Leistungsverstärker mit Spannungsausgang, der die Hochstrom-High-Side und Low-Side der Halbbrückenschaltung ansteuert IGBT Tore.
Ein Beispiel sind die Power Integrations 400-W BRD1167 und BRD1267 BridgeSwitch ICs, die einen kontinuierlichen RMS-Phasenstrom von 1.33 A und einen FREDFET-Gleichstrom von 11.5 A liefern. Sie sind selbstversorgt und werden wie der Rest der BridgeSwitch-Familie im oberflächenmontierbaren InSOP-24C-Gehäuse geliefert. Diese Geräte unterstützen alle gängigen MCU- und Motorsteuerungsmethoden und können ein- oder mehrphasige Hochspannungs-Synchron- oder -Asynchronmotoren betreiben. Überstrom-, Über-/Unterspannungs- und Übertemperaturschutz sind in allen BridgeSwitch-ICs enthalten, was die IEC 60335- und IEC 60730-Zertifizierung vereinfacht.
Ein weiteres Beispiel ist die von Monolithic Power Systems Inc MP6612D reversibler Motortreiber, der eine H-Brücke verwendet. Es kann einen Gleichstrommotor, eine Schrittmotorwicklung und andere Lasten betreiben. Vier N-Kanal-Leistung Mosfets und eine interne Ladungspumpe erzeugen die Gate-Treiberspannungen in der H-Brücke. Die DIR- und ENBL-Pins werden verwendet, um die Ausgänge zu steuern.

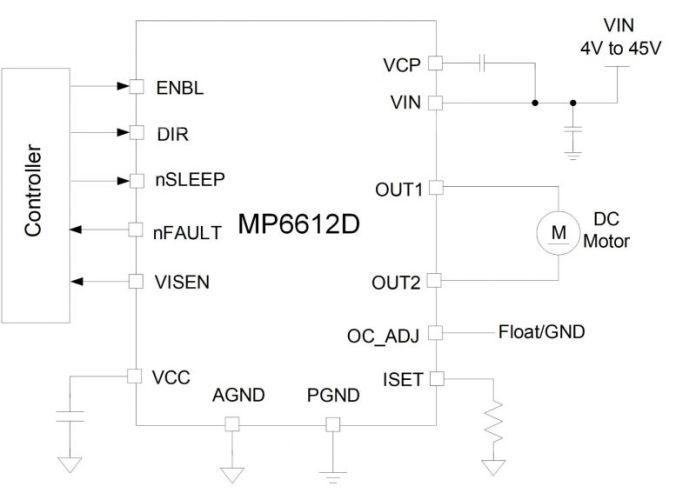
MP6612D-Blockdiagramm (Quelle: Monolithic Power Systems Inc.)
Halbleiter mit großer Bandlücke
Für neue elektronische Anwendungen sind Elektromotorendesigns erforderlich, die aus immer kompakteren Plattformen eine höhere Leistung herausholen. Motortreiberschaltungen, die auf klassischen Silizium-MOSFETs und IGBTs basieren, haben Mühe, die neuen Kriterien zu erfüllen. Es wird für Designer immer schwieriger, die Leistungsverluste unter Kontrolle zu halten, da sich die Siliziumtechnologie den theoretischen Grenzen für Leistungsdichte, Durchbruchspannung und Schaltfrequenz nähert. Die Hauptfolgen dieser Beschränkungen sind eine verringerte Effizienz und zusätzliche Leistungsprobleme bei hohen Betriebstemperaturen und Schaltraten.
Halbleiter mit großer Bandlücke (WBG) wie Siliziumkarbid (SiC) und Galliumnitrid (GaN) werden in der Motorsteuerung verwendet, da sie ein schnelleres Schalten ermöglichen, das für Motoren erforderlich sein kann, die mit hohen Grundfrequenzen arbeiten und eine gut gefilterte Welligkeit erfordern. Die hohen Schaltgeschwindigkeiten der WBG-Bausteine erzeugen jedoch, während sie höhere Umwandlungswirkungsgrade bieten, auch sehr schnelle Spannungsschwankungen, die zu hohen Spannungsänderungsraten (dV/dt) führen, die die Isolierung der Motorwicklungen belasten können. Daher haben leistungselektronische Anwendungen zwei Hauptziele: das Management thermischer Probleme und die Reduzierung der Systemgröße.
Hersteller wie Texas Instruments haben integrierte GaN-Leistungsgeräte entwickelt, die dazu beitragen, die beste Leistung von WBG-Geräten zu erzielen. Zum Beispiel die LMG5200 bietet eine 80-V-GaN-Halbbrücken-Leistungsstufe mit GaN-FETs vom Anreicherungstyp. Das Gerät besteht aus zwei GaN-FETs, die von einem Hochfrequenz-GaN-FET-Treiber in einer Halbbrückenanordnung gespeist werden.
TI liefert das TIDA-00909, ein Referenzdesign für Hochfrequenz-Motorantriebe, das einen dreiphasigen Wechselrichter mit drei LMG5200 verwendet, um die Entwicklung mit dem Gerät zu vereinfachen. Zur einfachen Leistungsbewertung verfügt der TIDA-00909 über eine geeignete Schnittstelle zum Anschluss an ein C2000 MCU LaunchPad Development Kit.

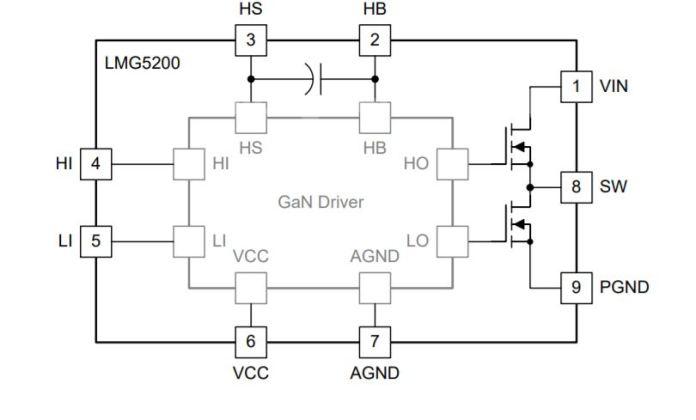
LMG5200-Blockdiagramm (Quelle: Texas Instruments Inc.)


EPC9146 Leistungsplatine. Klicken Sie für ein größeres Bild. (Quelle: EPC)
Ein weiteres Beispiel sind EPCs EPC9146 Powerboard, das die monolithische ePower Stage EPC2152 mit integriertem Gate-Treiber unter Verwendung der proprietären GaN-IC-Technologie von EPC enthält und eine maximale Gerätespannung von 80 V und einen maximalen Ausgangsstrom von 15 A liefert. Mit einer PWM-Frequenz von bis zu 3 MHz kann er unter Volllast laufen. Der EPC9146 bietet Funktionen für Leistungsantriebsanwendungen, wie eine monolithische Leistungsstufe mit integriertem Gate-Treiber, geregelte Hilfsstromschienen für Haushaltsgeräte, Spannungs- und Temperaturerfassung, präzise Stromerfassung und Schutzfunktionen.
Der EPC9146 kann mit den passenden Boards der EPC9147-Serie gepaart werden, damit der Benutzer die Leistungsplatine direkt über eine Mainstream-MCU-Platine steuern und vorhandene Ressourcen für schnelle Entwicklungszwecke nutzen kann.
Die Komplexität eines Roboters erfordert den richtigen Fahrer, um seine Funktion in Bezug auf die industrielle Anwendung richtig auszuführen. WBG-Halbleiter werden in der Motorsteuerung eingesetzt, weil sie ein schnelleres Schalten ermöglichen, das bei Motoren mit hohen Grundfrequenzen notwendig ist. Anstatt ein kompliziertes Antriebssystem zu entwickeln, konzentrieren sich Ingenieure lieber auf das, was ihr Gadget-Design unverwechselbar macht.
über Efficient Power Conversion (EPC)Monolithische StromversorgungssystemePower IntegrationsTexas Instruments