Motor elektrik ialah peranti yang mengubah tenaga elektrik kepada tenaga mekanikal, yang boleh digunakan untuk menggerakkan sistem artikulasi. Motor elektrik mesti mampu menghasilkan tork yang besar pada kelajuan rendah dan sangat cekap merentasi julat beban. Ia juga memerlukan mekanisme kawalan dan pemanduan yang mudah. Walaupun mereka memerlukan kawalan yang lebih kompleks, motor DC tanpa berus (BLDC) mencari rumah dalam aplikasi robotik kerana prestasinya yang lebih baik.
Motor BLDC semakin popular di seluruh dunia berkat kos pengeluaran yang lebih rendah. Ketibaan dron pengguna dan e-basikal, khususnya, telah menghasilkan penggunaan meluas motor BLDC, yang sebelum ini digunakan dalam aplikasi industri mewah sahaja.
Jurutera yang membangunkan aplikasi motor BLDC ini telah berubah sejak dua dekad yang lalu, sama seperti kawalan motor. Jurutera hari ini lebih suka menumpukan pada perkara yang menjadikan reka bentuk peranti mereka unik daripada membina sistem pendorong yang kompleks. Jurutera memberi tumpuan kepada reka bentuk yang lebih licin dengan faktor bentuk yang minimum, antara muka pengguna yang intuitif, keupayaan masa nyata, keselamatan berfungsi dan perkongsian data dalam awan.
Masalah kawalan
Bahagian penting sistem robotik ialah pengawal motor. Beberapa strategi kawalan boleh digunakan untuk mengendalikan manipulator robotik, atau lengan robotik. The teknologi digunakan dan cara ia dilaksanakan boleh memberi kesan yang besar terhadap prestasi manipulator dan, sebagai hasilnya, pada julat aplikasi yang berdaya maju. Reka bentuk mekanikal manipulator dan sistem penggerak pula mempengaruhi jenis skim kawalan yang boleh digunakan.
Walaupun tugas robot biasanya dinyatakan dalam ruang operasi, tindakan kawalan dilaksanakan dalam ruang bersama dari segi gerakan pelbagai bahagian robot. Akibatnya, adalah munasabah untuk memeriksa dua jenis skim kawalan: satu untuk ruang bersama dan satu lagi untuk ruang operasi. Struktur pengawal ialah sistem kawalan gelung tertutup dalam kedua-dua skim untuk memanfaatkan faedah maklum balas dari segi daya tahan terhadap potensi kesan yang tidak diketahui pada model dan meminimumkan kesan gangguan seperti hingar.
Isu kawalan ruang bersama memerlukan penyelesaian kinematik songsang manipulator untuk menukar keperluan gerakan daripada operasi kepada ruang sendi. Skim kawalan kemudian dibuat supaya gerakan struktur mekanikal boleh mengikut gerakan yang dimaksudkan. Sebagai perbandingan, kawalan dalam ruang operasi memerlukan tahap kerumitan pengiraan yang jauh lebih tinggi di mana penyongsangan kinematik dimasukkan ke dalam sistem gelung tertutup.
Sistem pengendalian yang digunakan, serta pelbagai pendekatan dan litar berdasarkan keperluan motor dan aplikasi, diperlukan untuk mengawal kelajuan dan arah motor. Matlamat pengawal motor adalah untuk dapat mengendalikan motor elektrik secara manual atau automatik (perhentian mula, penyongsangan, kelajuan, kilasan, dan perlindungan terhadap voltan beban berlebihan).
Motor tradisional mempunyai beberapa faedah yang tidak dimiliki oleh motor BLDC. Motor segerak magnet kekal (PMSM) dipacu BLDC dan AC boleh memberikan ketepatan yang diperlukan dan kecekapan tinggi dalam faktor bentuk padat. Selain itu, motor DC jenis berus dan motor aruhan AC mudah disambungkan dan dikendalikan, tidak seperti BLDC dan PMSM, yang lebih kompleks.


Kit enjin DRV8301-69M-KIT termasuk a Tiga Fasa pemandu dengan wang bersepadu pengatur dan penguat arus-shunt. Klik untuk imej yang lebih besar. (Sumber: Texas Instruments Inc.)
Contohnya, BLDC menggunakan teknik seperti kawalan vektor tanpa sensor (juga dipanggil kawalan berorientasikan medan, atau FOC) yang menawarkan kecekapan yang baik dan kelebihan menghapuskan sensor perkakasan, dengan itu mengurangkan kos dan meningkatkan kebolehpercayaan. Masalah bagi pereka bentuk ialah kawalan vektor tanpa sensor adalah rumit untuk dilaksanakan, jadi penggunaannya boleh memanjangkan masa pembangunan, menambah kos dan mungkin melebihi ramalan masa ke pasaran.
Untuk menyelesaikan dilema ini, pereka boleh beralih kepada platform pembangunan seperti DRV8301-69M-KIT kit enjin daripada Texas Instruments Inc. yang termasuk pemacu pintu tiga fasa DRV8301 yang disepadukan dengan pengawal selia buck dan penguat arus-shunt dan papan mikropengawal (MCU) Piccolo TMS320F28069M yang didayakan InstaSPIN-FOC dan InstaSPIN-MOTION.
Walaupun kerumitan reka bentuk, faedah utama BLDC timbul daripada ciri pembinaannya. Mereka biasanya menawarkan kecekapan 15% hingga 20% lebih tinggi daripada penyelesaian berus, memerlukan kurang penyelenggaraan kerana reka bentuk tanpa berus mereka, dan memberikan lengkung tork rata pada semua kelajuan yang dinilai. Dalam banyak aplikasi, motor berus telah digantikan oleh BLDC kerana kemajuan terkini dalam Semikonduktor teknologi, penambahbaikan dalam magnet kekal, dan peningkatan permintaan untuk kecekapan yang lebih tinggi.
Pemandu DC
BLDC menggunakan pertukaran elektronik, yang membolehkan pensuisan arus yang lebih baik. Ia membawa kepada tork yang lebih besar, kawalan kelajuan yang tepat pada julat yang luas dan prestasi motor yang lebih baik. Jambatan separuh atau jambatan separuh H litar terdapat dalam kebanyakan pengawal motor BLDC. Reka bentuk litar ini, tidak seperti jambatan H, hanya mempunyai dua suis: satu sisi tinggi dan satu sisi rendah Transistor.
Motor BLDC fasa tunggal, dua fasa dan tiga fasa tersedia. Jenis tiga fasa adalah yang paling popular. Bilangan belitan pemegun motor berkorelasi dengan bilangan fasa, tetapi kutub rotor mungkin sebarang bilangan pasangan, bergantung pada aplikasi.
Komponen asas kawalan BLDC ialah pemandu. Ia adalah penguat kuasa voltan keluaran yang memacu litar separuh jambatan arus tinggi sisi tinggi dan sisi rendah IGBT pintu pagar.
Satu contoh ialah Power Integrations 400-W BRD1167 dan BRD1267 BridgeSwitch IC yang menyediakan arus fasa RMS berterusan sebanyak 1.33 A dan arus keluaran FREDFET DC sebanyak 11.5 A. Ia dikuasakan sendiri dan terdapat dalam pakej pemasangan permukaan InSOP-24C, sama seperti seluruh keluarga BridgeSwitch. Peranti ini menyokong semua kaedah kawalan MCU dan motor utama serta boleh mengendalikan motor segerak atau tak segerak voltan tinggi fasa tunggal atau berbilang fasa. Perlindungan arus lebih, lebihan/kurang voltan dan suhu lampau disertakan dalam semua IC BridgeSwitch, memudahkan pensijilan IEC 60335 dan IEC 60730.
Contoh lain ialah Monolithic Power Systems Inc MP6612D pemandu motor boleh balik yang menggunakan jambatan H. Ia boleh mengendalikan motor DC, penggulungan motor stepper, dan beban lain. Empat kuasa saluran N mosfet dan pam cas dalaman mencipta voltan pemacu get dalam jambatan-H. Pin DIR dan ENBL digunakan untuk mengawal output.

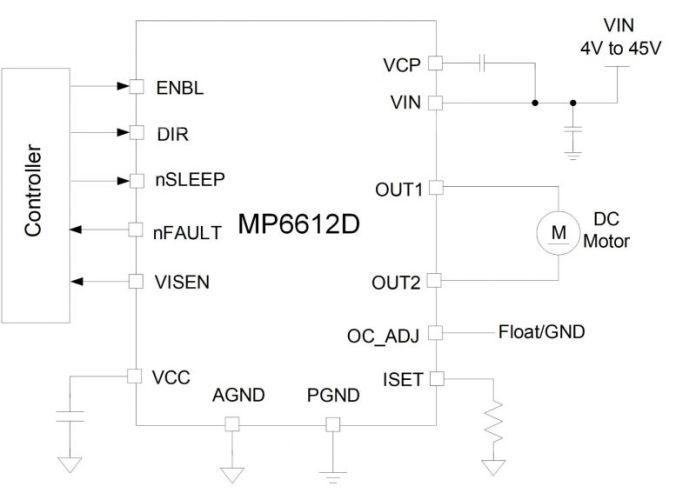
Gambar rajah blok MP6612D (Sumber: Monolithic Power Systems Inc.)
Semikonduktor jurang jalur lebar
Reka bentuk motor elektrik yang mengekstrak prestasi lebih tinggi daripada platform yang semakin padat diperlukan untuk aplikasi elektronik yang baru muncul. Litar pemandu motor yang bergantung pada MOSFET silikon klasik dan IGBT sedang bergelut untuk memenuhi kriteria baharu. Ia menjadi lebih sukar bagi pereka bentuk untuk mengekalkan kehilangan kuasa di bawah kawalan kerana teknologi silikon menghampiri had teori untuk ketumpatan kuasa, voltan pecahan dan frekuensi pensuisan. Akibat utama kekangan ini adalah pengurangan kecekapan dan isu prestasi tambahan pada suhu operasi yang tinggi dan kadar pensuisan.
Separuh jalur lebar (WBG) seperti peranti silikon karbida (SiC) dan galium nitrida (GaN) digunakan dalam kawalan motor kerana ia menyediakan pensuisan yang lebih pantas yang mungkin diperlukan untuk motor yang beroperasi pada frekuensi asas yang tinggi dan memerlukan riak yang ditapis dengan baik. Walau bagaimanapun, kelajuan pensuisan tinggi yang dicapai oleh peranti WBG, sambil menawarkan kecekapan penukaran yang lebih tinggi, juga menjana variasi voltan yang sangat pantas yang mengakibatkan kadar perubahan voltan tinggi (dV/dt) yang boleh menekankan penebat belitan motor. Oleh itu, aplikasi kuasa-elektronik mempunyai dua objektif utama: mengurus isu terma dan mengurangkan saiz sistem.
Pengeluar seperti Texas Instruments telah membangunkan peranti kuasa bersepadu GaN yang membantu mendapatkan prestasi terbaik daripada peranti WBG. Sebagai contoh, yang LMG5200 menyediakan peringkat kuasa separuh jambatan GaN 80-V dengan GaN FET mod peningkatan. Peranti ini terdiri daripada dua GaN FET yang dikuasakan oleh satu pemacu GaN FET frekuensi tinggi dalam susunan separuh jambatan.
TI membekalkan TIDA-00909, reka bentuk rujukan untuk pemacu motor frekuensi tinggi menggunakan penyongsang tiga fasa dengan tiga LMG5200s, untuk memudahkan reka bentuk dengan peranti. Untuk penilaian prestasi mudah, TIDA-00909 dilengkapi dengan antara muka yang sesuai untuk menyambung kepada kit pembangunan C2000 MCU LaunchPad.

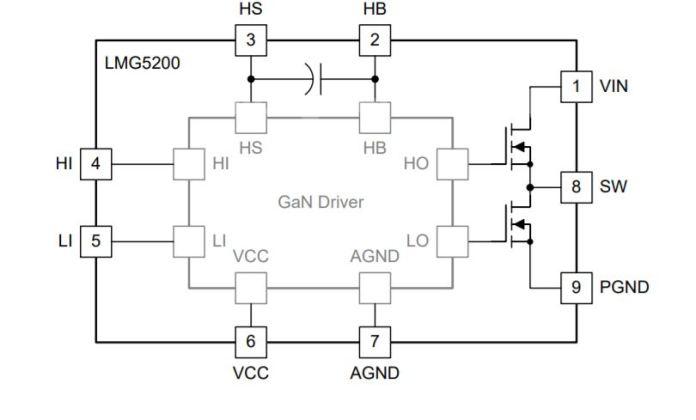
Gambar rajah blok LMG5200 (Sumber: Texas Instruments Inc.)


Papan kuasa EPC9146. Klik untuk imej yang lebih besar. (Sumber: EPC)
Contoh lain ialah EPC EPC9146 papan kuasa, yang menggabungkan Peringkat ePower monolitik EPC2152 dengan pemacu pintu bersepadu menggunakan teknologi IC GaN proprietari EPC, dan menyampaikan voltan peranti maksimum 80-V dan arus keluaran maksimum 15-A. Dengan frekuensi PWM sehingga 3 MHz, ia boleh berjalan pada beban penuh. EPC9146 menawarkan ciri untuk aplikasi pemacu kuasa, seperti peringkat kuasa monolitik dengan pemacu pintu bersepadu, rel kuasa tambahan yang dikawal untuk bekalan pengemasan, penderiaan voltan dan suhu, penderiaan arus yang tepat dan fungsi perlindungan.
EPC9146 boleh dipasangkan dengan papan pemadan siri EPC9147 untuk membolehkan pengguna mengawal papan kuasa secara terus melalui papan MCU arus perdana, memanfaatkan sumber sedia ada untuk tujuan pembangunan pantas.
Kerumitan robot memerlukan pemandu yang tepat untuk melaksanakan fungsinya dengan betul berkaitan dengan aplikasi industri. Semikonduktor WBG digunakan dalam kawalan motor kerana ia membenarkan pensuisan yang lebih cepat, yang diperlukan untuk motor yang beroperasi pada frekuensi asas yang tinggi. Daripada mencipta sistem pendorong yang rumit, jurutera lebih suka menumpukan pada perkara yang menjadikan reka bentuk alat mereka tersendiri.
tentang Penukaran Kuasa Cekap (EPC)Sistem Kuasa MonolitikIntegrasi KuasaInstrumen Texas