I motori elettrici sono dispositivi che trasformano l'energia elettrica in energia meccanica, utilizzabile per movimentare sistemi articolati. Il motore elettrico deve essere in grado di produrre una coppia sostanziale a basse velocità ed essere estremamente efficiente in tutto il range di carico. Richiede anche un controllo diretto e un meccanismo di guida. Sebbene richiedano un controllo più complesso, i motori CC senza spazzole (BLDC) stanno trovando case nelle applicazioni robotiche grazie alle loro prestazioni migliori.
I motori BLDC stanno guadagnando popolarità su tutta la linea grazie ai loro costi di produzione inferiori. L'arrivo dei droni consumer e delle e-bike, in particolare, ha portato all'adozione diffusa di motori BLDC, che in precedenza erano utilizzati solo in applicazioni industriali di fascia alta.
Gli ingegneri che stanno sviluppando queste applicazioni per motori BLDC sono cambiati negli ultimi due decenni, tanto quanto il controllo del motore. L'ingegnere di oggi preferisce concentrarsi su ciò che rende unico il design del proprio dispositivo piuttosto che sulla costruzione di un complesso sistema di propulsione. Gli ingegneri si stanno concentrando su design più eleganti con un fattore di forma minimo, interfacce utente intuitive, funzionalità in tempo reale, sicurezza funzionale e condivisione dei dati nel cloud.
Il problema del controllo
Una parte significativa di un sistema robotico è il controller del motore. È possibile utilizzare diverse strategie di controllo per azionare un manipolatore robotico o un braccio robotico. IL la tecnologia utilizzato e il modo in cui viene implementato possono avere un impatto considerevole sulle prestazioni del manipolatore e, di conseguenza, sulla gamma di applicazioni praticabili. La progettazione meccanica del manipolatore e del sistema di attuazione, d'altro canto, influenza il tipo di schema di controllo che può essere utilizzato.
Mentre il lavoro del robot è tipicamente dichiarato in uno spazio operativo, le azioni di controllo sono implementate nello spazio articolare in termini di movimento delle varie parti del robot. Di conseguenza, è ragionevole esaminare due tipi di schemi di controllo: uno per lo spazio congiunto e un altro per lo spazio operativo. La struttura del controller è un sistema di controllo ad anello chiuso in entrambi gli schemi per sfruttare i vantaggi del feedback in termini di resilienza a potenziali effetti sconosciuti sul modello e minimizzazione degli effetti di disturbo come il rumore.
Il problema del controllo dello spazio articolare comporta la risoluzione della cinematica inversa del manipolatore per convertire i requisiti di movimento dallo spazio operativo allo spazio articolare. Lo schema di controllo viene quindi creato in modo che il movimento della struttura meccanica possa seguire il movimento previsto. In confronto, il controllo nello spazio operativo richiede un livello molto più elevato di complessità computazionale in cui l'inversione cinematica è incorporata nel sistema a circuito chiuso.
Il sistema operativo in uso, nonché vari approcci e circuiti basati sulle esigenze del motore e dell'applicazione, sono necessari per controllare la velocità e la direzione dei motori. Lo scopo di un controllore motore è di essere in grado di azionare un motore elettrico manualmente o automaticamente (start-stop, inversione, velocità, torsione e protezione contro voltaggio sovraccarichi).
I motori tradizionali hanno una serie di vantaggi che i motori BLDC non hanno. I motori sincroni a magneti permanenti (PMSM) azionati da BLDC e CA possono fornire la precisione richiesta e l'elevata efficienza in un fattore di forma compatto. Inoltre, i motori CC a spazzole e i motori a induzione CA sono facili da collegare e utilizzare, a differenza dei BLDC e dei PMSM, che sono più complessi.


Il kit motore DRV8301-69M-KIT include un Trifase driver con buck integrato regolatore e amplificatori di shunt di corrente. Clicca per ingrandire l'immagine. (Fonte: Texas Instruments Inc.)
Ad esempio, i BLDC utilizzano tecniche come il controllo vettoriale sensorless (chiamato anche controllo orientato al campo o FOC) che offrono una buona efficienza e il vantaggio di eliminare sensore hardware, riducendo così i costi e migliorando l'affidabilità. Il problema per i progettisti è che il controllo vettoriale sensorless è complicato da implementare, quindi il suo utilizzo può allungare i tempi di sviluppo, aggiungere costi e possibilmente superare le previsioni di time-to-market.
Per risolvere questo dilemma, i progettisti possono rivolgersi a piattaforme di sviluppo come il DRV8301-69M-KIT kit motore di Texas Instruments Inc. che include un gate driver trifase DRV8301 integrato con un regolatore buck e amplificatori shunt di corrente e una scheda microcontrollore (MCU) Piccolo TMS320F28069M InstaSPIN-FOC e InstaSPIN-MOTION.
Nonostante la complessità del design, i principali vantaggi di un BLDC derivano dalle sue caratteristiche costruttive. In genere offrono un'efficienza dal 15% al 20% superiore rispetto alle soluzioni con spazzole, richiedono meno manutenzione grazie al loro design senza spazzole e forniscono una curva di coppia piatta a tutte le velocità nominali. In molte applicazioni, i motori a spazzole sono stati sostituiti dai BLDC a causa dei recenti progressi in Semiconduttore tecnologia, miglioramenti nei magneti permanenti e aumento della domanda di maggiore efficienza.
Driver CC
I BLDC utilizzano la commutazione elettronica, che consente una migliore commutazione della corrente. Porta a una coppia maggiore, a un controllo accurato della velocità su un'ampia gamma e a prestazioni del motore migliorate. Un mezzo ponte o mezzo ponte H circuito si trova nella maggior parte dei controller motore BLDC. Questo design del circuito, a differenza di un ponte H, ha solo due interruttori: uno high-side e uno low-side Transistor.
Sono disponibili motori BLDC monofase, bifase e trifase. Il tipo trifase è il più popolare. Il numero di avvolgimenti dello statore del motore è correlato al numero di fasi, ma i poli del rotore potrebbero essere un numero qualsiasi di coppie, a seconda dell'applicazione.
Una componente fondamentale del controllo BLDC è il driver. Si tratta di un amplificatore di potenza con uscita in tensione che pilota il lato alto e il lato basso ad alta corrente del circuito a mezzo ponte IGBT cancelli.
Un esempio sono le integrazioni di alimentazione da 400 W BRD1167 e BRD1267 BridgeSwitch Circuiti integrati che forniscono una corrente di fase RMS continua di 1.33 A e una corrente di uscita CC FREDFET di 11.5 A. Sono autoalimentati e sono forniti nel contenitore a montaggio superficiale InSOP-24C, proprio come il resto della famiglia BridgeSwitch. Questi dispositivi supportano tutti i principali MCU e metodi di controllo del motore e possono azionare motori sincroni o asincroni ad alta tensione monofase o multifase. La protezione da sovracorrente, sovra/sottotensione e sovratemperatura è inclusa in tutti i circuiti integrati BridgeSwitch, semplificando la certificazione IEC 60335 e IEC 60730.
Un altro esempio è quello di Monolytic Power Systems Inc. MP6612D driver del motore reversibile che utilizza un H-bridge. Può azionare un motore CC, un avvolgimento del motore passo-passo e altri carichi. Potenza a quattro canali N mosfet e una pompa di carica interna creano le tensioni del gate driver nel ponte H. I pin DIR e ENBL vengono utilizzati per controllare le uscite.

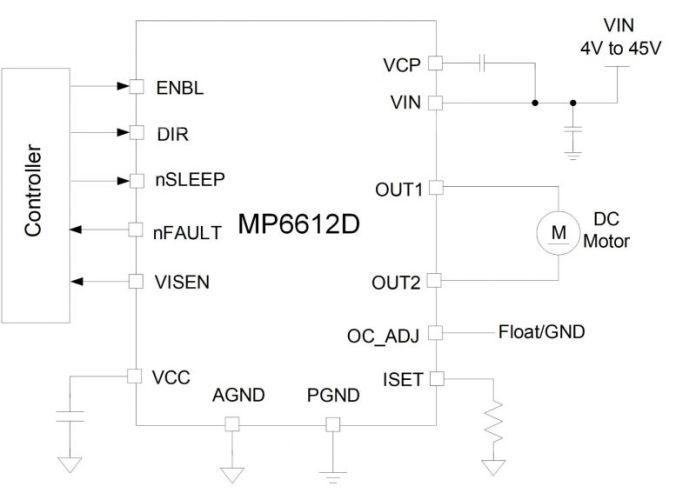
Schema a blocchi MP6612D (Fonte: Monolytic Power Systems Inc.)
Semiconduttori a banda larga
Per le applicazioni elettroniche emergenti sono necessari progetti di motori elettrici che estraggono prestazioni più elevate da piattaforme sempre più compatte. I circuiti di pilotaggio del motore che si basano su MOSFET e IGBT al silicio classici stanno lottando per soddisfare i nuovi criteri. Sta diventando sempre più difficile per i progettisti tenere sotto controllo le perdite di potenza poiché la tecnologia al silicio si avvicina ai limiti teorici per la densità di potenza, la tensione di rottura e la frequenza di commutazione. Le principali conseguenze di questi vincoli sono la riduzione dell'efficienza e ulteriori problemi di prestazioni a temperature di esercizio e velocità di commutazione elevate.
I semiconduttori a banda larga (WBG) come i dispositivi al carburo di silicio (SiC) e al nitruro di gallio (GaN) sono utilizzati nel controllo dei motori perché forniscono una commutazione più rapida che potrebbe essere necessaria per motori che funzionano a frequenze fondamentali elevate e richiedono un'ondulazione ben filtrata. Tuttavia, le elevate velocità di commutazione raggiunte dai dispositivi WBG, pur offrendo maggiori efficienze di conversione, generano anche variazioni di tensione molto veloci che si traducono in tassi di variazione di alta tensione (dV/dt) che possono sollecitare l'isolamento degli avvolgimenti del motore. Le applicazioni di elettronica di potenza, quindi, hanno due obiettivi principali: gestire i problemi termici e ridurre le dimensioni del sistema.
Produttori come Texas Instruments hanno sviluppato dispositivi di alimentazione integrati GaN che aiutano a ottenere le migliori prestazioni dai dispositivi WBG. Ad esempio, il LMG5200 fornisce uno stadio di potenza a semiponte GaN da 80 V con FET GaN in modalità di miglioramento. Il dispositivo è costituito da due GaN FET alimentati da un driver GaN FET ad alta frequenza in una disposizione a semiponte.
TI fornisce il TIDA-00909, un progetto di riferimento per azionamenti motore ad alta frequenza che utilizza un inverter trifase con tre LMG5200, per semplificare la progettazione con il dispositivo. Per una semplice valutazione delle prestazioni, TIDA-00909 è dotato di un'interfaccia adatta per il collegamento a un kit di sviluppo LaunchPad MCU C2000.

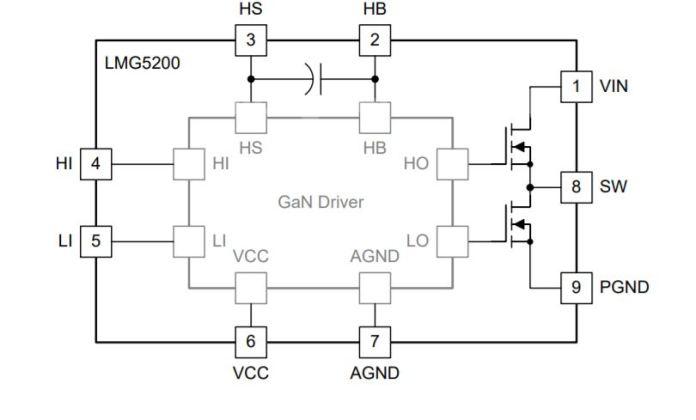
Schema a blocchi LMG5200 (Fonte: Texas Instruments Inc.)


Scheda di potenza EPC9146. Clicca per ingrandire l'immagine. (Fonte: EPC)
Un altro esempio sono gli EPC EPC9146 scheda di alimentazione, che incorpora l'ePower Stage monolitico EPC2152 con un gate driver integrato che utilizza la tecnologia GaN IC proprietaria di EPC e fornisce una tensione massima del dispositivo di 80 V e una corrente di uscita massima di 15 A. Con una frequenza PWM fino a 3 MHz, può funzionare a pieno carico. L'EPC9146 offre funzionalità per applicazioni di alimentazione, come uno stadio di potenza monolitico con gate driver integrato, guide di alimentazione ausiliarie regolate per le forniture domestiche, rilevamento di tensione e temperatura, rilevamento preciso della corrente e funzioni di protezione.
L'EPC9146 può essere abbinato alle schede di accoppiamento della serie EPC9147 per consentire all'utente di controllare la scheda di alimentazione direttamente attraverso una scheda MCU mainstream, sfruttando le risorse esistenti per scopi di sviluppo rapido.
La complessità di un robot richiede il giusto driver per svolgere la sua funzione correttamente correlata all'applicazione industriale. I semiconduttori WBG sono impiegati nel controllo dei motori perché consentono una commutazione più rapida, necessaria per motori che funzionano ad alte frequenze fondamentali. Piuttosto che creare un complicato sistema di propulsione, gli ingegneri preferiscono concentrarsi su ciò che rende distintivo il design del loro gadget.
informazioni sulla conversione efficiente della potenza (EPC)Sistemi di alimentazione monoliticiIntegrazioni di potenzaTexas Instruments