Elektrik motorları, elektrik enerjisini mafsallı sistemleri hareket ettirmek için kullanılabilecek mekanik enerjiye dönüştüren cihazlardır. Elektrik motorunun düşük hızlarda önemli miktarda tork üretebilmesi ve yük aralığında son derece verimli olması gerekir. Aynı zamanda basit bir kontrol ve sürüş mekanizması gerektirir. Daha karmaşık kontrol gerektirmelerine rağmen fırçasız DC motorlar (BLDC'ler), daha iyi performansları nedeniyle robotik uygulamalarda kendine yer buluyor.
BLDC motorlar, düşük üretim maliyetleri sayesinde her alanda popülerlik kazanıyor. Özellikle tüketici drone'larının ve e-bisikletlerin gelişi, daha önce yalnızca üst düzey endüstriyel uygulamalarda kullanılan BLDC motorların yaygın şekilde benimsenmesine yol açtı.
Bu BLDC motor uygulamalarını geliştiren mühendisler, son yirmi yılda motor kontrolü kadar değişti. Günümüzün mühendisi, karmaşık bir tahrik sistemi oluşturmak yerine, cihaz tasarımını benzersiz kılan şeye odaklanmayı tercih ediyor. Mühendisler, minimum form faktörüne, sezgisel kullanıcı arayüzlerine, gerçek zamanlı yeteneklere, işlevsel güvenliğe ve bulutta veri paylaşımına sahip daha şık tasarımlara odaklanıyor.
Kontrol sorunu
Robotik sistemin önemli bir kısmı motor kontrolörüdür. Robotik bir manipülatörü veya robotik kolu çalıştırmak için çeşitli kontrol stratejileri kullanılabilir. teknoloji Kullanıldığı ve nasıl uygulandığı, manipülatörün performansı ve sonuç olarak uygulanabilir uygulama yelpazesi üzerinde önemli bir etkiye sahip olabilir. Manipülatörün ve çalıştırma sisteminin mekanik tasarımı ise kullanılabilecek kontrol şemasının türünü etkiler.
Robotun görevi tipik olarak operasyonel bir alanda belirtilirken, kontrol eylemleri, robotun çeşitli parçalarının hareketi açısından ortak alanda uygulanır. Sonuç olarak, iki tür kontrol şemasını incelemek mantıklı olacaktır: biri ortak alan için, diğeri operasyonel alan için. Kontrolör yapısı, model üzerindeki potansiyel bilinmeyen etkilere karşı dayanıklılık ve gürültü gibi rahatsızlık etkilerinin en aza indirilmesi açısından geri bildirimin faydalarından yararlanmak için her iki şemada da kapalı döngü bir kontrol sistemidir.
Eklem alanı kontrolü sorunu, hareket gereksinimlerini operasyonel alandan eklem alanına dönüştürmek için manipülatörün ters kinematiğinin çözülmesini gerektirir. Daha sonra kontrol şeması, mekanik yapının hareketinin amaçlanan hareketi takip edebileceği şekilde oluşturulur. Buna karşılık, operasyonel uzaydaki kontrol, kinematik tersinmenin kapalı döngü sistemine dahil edildiği çok daha yüksek düzeyde hesaplama karmaşıklığı gerektirir.
Motorların hızını ve yönünü kontrol etmek için kullanılan işletim sisteminin yanı sıra motor ve uygulama ihtiyaçlarına göre çeşitli yaklaşımlar ve devreler gereklidir. Motor kontrol cihazının amacı, bir elektrik motorunu manuel veya otomatik olarak çalıştırabilmektir (başlatma-durdurma, ters çevirme, hız, burulma ve darbelere karşı koruma). Voltaj aşırı yükler).
Geleneksel motorların, BLDC motorların sahip olmadığı birçok avantajı vardır. BLDC ve AC tahrikli sabit mıknatıslı senkron motorlar (PMSM'ler), kompakt bir form faktöründe gerekli hassasiyeti ve yüksek verimliliği sağlayabilir. Ayrıca, daha karmaşık olan BLDC'ler ve PMSM'lerin aksine, fırça tipi DC motorların ve AC endüksiyon motorlarının bağlanması ve çalıştırılması kolaydır.


DRV8301-69M-KIT motor kiti şunları içerir: Üç faz entegre paralı sürücü regülatör ve akım şönt yükselteçleri. Daha büyük bir resim için tıklayın. (Kaynak: Texas Instruments Inc.)
Örneğin, BLDC'ler, iyi bir verimlilik ve ortadan kaldırma avantajı sunan sensörsüz vektör kontrolü (aynı zamanda alan odaklı kontrol veya FOC olarak da adlandırılır) gibi teknikleri kullanır. algılayıcı donanım, böylece maliyeti azaltır ve güvenilirliği artırır. Tasarımcılar için sorun, sensörsüz vektör kontrolünün uygulanmasının karmaşık olması, bu nedenle kullanımının geliştirme süresini uzatabilmesi, maliyeti artırabilmesi ve muhtemelen pazara çıkış süresi tahminlerini aşabilmesidir.
Bu ikilemi çözmek için tasarımcılar aşağıdaki gibi geliştirme platformlarına başvurabilirler: DRV8301-69M-KIT Texas Instruments Inc.'den bir Buck regülatörü ve akım şönt amplifikatörleri ile entegre edilmiş bir DRV8301 üç fazlı geçit sürücüsü ve bir InstaSPIN-FOC ve InstaSPIN-MOTION özellikli Piccolo TMS320F28069M mikro denetleyici (MCU) kartı içeren motor kiti.
Tasarım karmaşıklığına rağmen BLDC'nin temel faydaları yapım özelliklerinden kaynaklanmaktadır. Genellikle fırçalı çözümlere göre %15 ila %20 daha yüksek verimlilik sunarlar, fırçasız tasarımları nedeniyle daha az bakıma ihtiyaç duyarlar ve tüm nominal hızlarda düz bir tork eğrisi sunarlar. Son yıllardaki gelişmeler nedeniyle birçok uygulamada fırçalı motorların yerini BLDC'ler almıştır. Yarıiletken teknoloji, kalıcı mıknatıslardaki gelişmeler ve daha yüksek verimliliğe olan talebin artması.
DC sürücüleri
BLDC'ler daha iyi akım değişimine olanak tanıyan elektronik komütasyon kullanır. Daha fazla torka, geniş bir aralıkta doğru hız kontrolüne ve gelişmiş motor performansına yol açar. Yarım köprü veya yarım H köprüsü devre Çoğu BLDC motor kontrol cihazında bulunur. Bu devre tasarımı, H köprüsünden farklı olarak yalnızca iki anahtara sahiptir: biri yüksek taraf, diğeri alçak taraf Transistor.
Tek fazlı, iki fazlı ve üç fazlı BLDC motorlar mevcuttur. Üç fazlı tip en popüler olanıdır. Motor statorunun sargı sayısı faz sayısıyla ilişkilidir, ancak rotor kutupları uygulamaya bağlı olarak herhangi bir sayıda çift olabilir.
BLDC kontrolünün temel bir bileşeni sürücüdür. Yarım köprü devresinin yüksek akımlı yüksek ve alçak taraflarını çalıştıran voltaj çıkışlı bir güç amplifikatörüdür. IGBT kapıları.
Bunun bir örneği, 400-W BRD1167 ve BRD1267 Güç Entegrasyonlarıdır. Köprü Anahtarı 1.33 A sürekli RMS faz akımı ve 11.5 A FREDFET DC çıkış akımı sağlayan IC'ler. Kendi güçlerine sahiptirler ve BridgeSwitch ailesinin geri kalanı gibi InSOP-24C yüzeye montaj paketiyle gelirler. Bu cihazlar tüm önemli MCU ve motor kontrol yöntemlerini destekler ve tek fazlı veya çok fazlı yüksek gerilim senkron veya asenkron motorları çalıştırabilir. Tüm BridgeSwitch IC'lerinde aşırı akım, aşırı/düşük gerilim ve aşırı sıcaklık koruması bulunur ve IEC 60335 ve IEC 60730 sertifikasyonu basitleştirilir.
Bir başka örnek ise Monolitik Güç Sistemleri A.Ş.'nin MP6612D H köprüsü kullanan ters çevrilebilir motor sürücüsü. Bir DC motoru, bir step motor sargısını ve diğer yükleri çalıştırabilir. Dört N-kanal gücü mosfetler ve dahili bir şarj pompası H köprüsündeki kapı sürücüsü voltajlarını oluşturur. DIR ve ENBL pinleri çıkışları kontrol etmek için kullanılır.

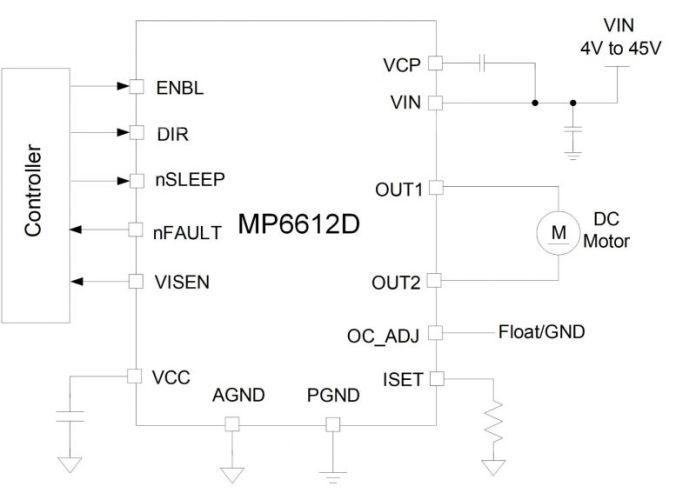
MP6612D blok diyagramı (Kaynak: Monolitik Güç Sistemleri A.Ş.)
Geniş bant aralıklı yarı iletkenler
Gelişmekte olan elektronik uygulamalar için giderek daha kompakt platformlardan daha yüksek performans elde eden elektrik motoru tasarımlarına ihtiyaç duyulmaktadır. Klasik silikon MOSFET'lere ve IGBT'lere dayanan motor sürücü devreleri yeni kriterleri yerine getirmekte zorlanıyor. Silikon teknolojisi güç yoğunluğu, arıza voltajı ve anahtarlama frekansı için teorik sınırlara yaklaştıkça tasarımcıların güç kayıplarını kontrol altında tutması daha da zorlaşıyor. Bu kısıtlamaların temel sonuçları, yüksek çalışma sıcaklıklarında ve anahtarlama hızlarında verimliliğin azalması ve ek performans sorunlarıdır.
Silikon karbür (SiC) ve galyum nitrür (GaN) gibi geniş bant aralıklı (WBG) yarı iletkenler, yüksek temel frekanslarda çalışan ve iyi filtrelenmiş dalgalanma gerektiren motorlar için gerekli olabilecek daha hızlı anahtarlama sağladıklarından motor kontrolünde kullanılır. Bununla birlikte, WBG cihazları tarafından elde edilen yüksek anahtarlama hızları, daha yüksek dönüştürme verimliliği sunarken aynı zamanda motor sargılarının yalıtımını zorlayabilecek yüksek voltaj değişim oranlarına (dV/dt) yol açan çok hızlı voltaj değişimleri de üretir. Bu nedenle güç elektroniği uygulamalarının iki ana hedefi vardır: termal sorunları yönetmek ve sistem boyutunu küçültmek.
Texas Instruments gibi üreticiler, WBG cihazlarından en iyi performansı elde etmenize yardımcı olan GaN entegre güç cihazları geliştirdi. Örneğin, LMG5200 geliştirme modu GaN FET'leri ile 80 V GaN yarım köprü güç aşaması sağlar. Cihaz, yarım köprü düzeninde bir yüksek frekanslı GaN FET sürücüsü tarafından desteklenen iki GaN FET'ten oluşur.
TI, cihazla tasarımı kolaylaştırmak için üç LMG00909'lü üç fazlı invertör kullanan yüksek frekanslı motor sürücülerine yönelik bir referans tasarım olan TIDA-5200'u sağlıyor. Basit performans değerlendirmesi için TIDA-00909, C2000 MCU LaunchPad geliştirme kitine bağlanmak için uygun bir arayüzle birlikte gelir.

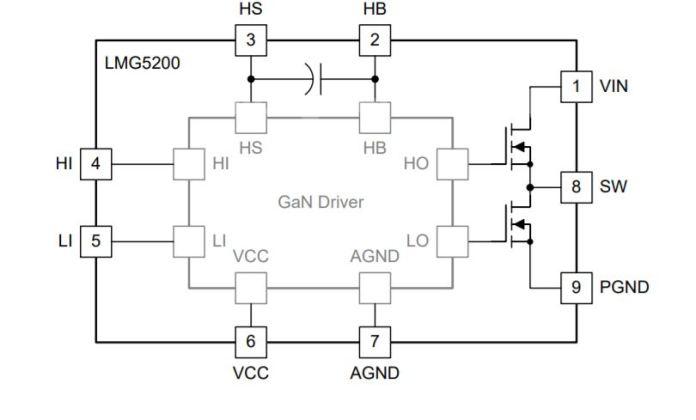
LMG5200 blok şeması (Kaynak: Texas Instruments Inc.)


EPC9146 güç kartı. Daha büyük bir resim için tıklayın. (Kaynak: EPC)
Başka bir örnek ise EPC'ler EPC9146 EPC2152 monolitik ePower Stage'i, EPC'nin tescilli GaN IC teknolojisini kullanan entegre bir kapı sürücüsüyle birleştiren ve 80 V maksimum cihaz voltajı ve 15 A maksimum çıkış akımı sağlayan güç kartı. 3 MHz'e kadar PWM frekansı ile tam yükte çalışabilir. EPC9146, entegre kapı sürücüsüne sahip monolitik güç aşaması, temizlik malzemeleri için düzenlenmiş yardımcı güç rayları, voltaj ve sıcaklık algılama, hassas akım algılama ve koruyucu işlevler gibi güç sürücüsü uygulamalarına yönelik özellikler sunar.
EPC9146, EPC9147 serisi birleştirme kartlarıyla eşleşerek kullanıcının güç kartını doğrudan ana MCU kartı üzerinden kontrol etmesine olanak tanıyarak hızlı geliştirme amacıyla mevcut kaynaklardan yararlanabilir.
Bir robotun karmaşıklığı, endüstriyel uygulamayla ilgili işlevini düzgün bir şekilde yerine getirebilmesi için doğru sürücünün kullanılmasını gerektirir. WBG yarı iletkenleri, yüksek temel frekanslarda çalışan motorlar için gerekli olan daha hızlı anahtarlamaya izin verdikleri için motor kontrolünde kullanılır. Mühendisler, karmaşık bir tahrik sistemi oluşturmak yerine, cihaz tasarımlarını farklı kılan şeylere odaklanmayı tercih ediyor.
Verimli Güç Dönüşümü (EPC)Monolitik Güç SistemleriGüç EntegrasyonlarıTexas Instruments hakkında