Les moteurs électriques sont des dispositifs qui transforment l'énergie électrique en énergie mécanique, qui peut être utilisée pour déplacer des systèmes articulés. Le moteur électrique doit être capable de produire un couple important à basse vitesse et être extrêmement efficace sur toute la plage de charge. Il nécessite également un mécanisme de commande et d'entraînement simple. Bien qu'ils nécessitent un contrôle plus complexe, les moteurs à courant continu sans balais (BLDC) trouvent leur place dans les applications robotiques en raison de leurs meilleures performances.
Les moteurs BLDC gagnent en popularité dans tous les domaines grâce à leurs coûts de production plus faibles. L'arrivée des drones grand public et des vélos électriques, en particulier, a entraîné l'adoption généralisée des moteurs BLDC, qui n'étaient auparavant utilisés que dans des applications industrielles haut de gamme.
Les ingénieurs qui développent ces applications de moteur BLDC ont changé au cours des deux dernières décennies, tout comme le contrôle moteur. L'ingénieur d'aujourd'hui préfère se concentrer sur ce qui rend la conception de son appareil unique plutôt que de construire un système de propulsion complexe. Les ingénieurs se concentrent sur des conceptions plus élégantes avec un facteur de forme minimal, des interfaces utilisateur intuitives, des capacités en temps réel, une sécurité fonctionnelle et un partage de données dans le cloud.
Le problème du contrôle
Le contrôleur de moteur constitue une partie importante d'un système robotique. Plusieurs stratégies de contrôle peuvent être utilisées pour faire fonctionner un manipulateur robotique ou un bras robotique. Le sans souci Son utilisation et la manière dont elle est mise en œuvre peuvent avoir un impact considérable sur les performances du manipulateur et, par conséquent, sur la gamme d’applications viables. La conception mécanique du manipulateur et du système d’actionnement, quant à elle, influence le type de schéma de commande pouvant être utilisé.
Alors que le travail du robot est généralement indiqué dans un espace opérationnel, les actions de contrôle sont mises en œuvre dans l'espace articulaire en termes de mouvement des différentes parties du robot. En conséquence, il est raisonnable d'examiner deux types de schémas de contrôle : un pour l'espace commun et un autre pour l'espace opérationnel. La structure du contrôleur est un système de contrôle en boucle fermée dans les deux schémas pour tirer parti des avantages de la rétroaction en termes de résilience aux effets potentiels inconnus sur le modèle et de minimisation des effets de perturbation tels que le bruit.
Le problème du contrôle de l'espace articulaire consiste à résoudre la cinématique inverse du manipulateur pour convertir les exigences de mouvement de l'espace opérationnel à l'espace articulaire. Le schéma de contrôle est alors créé pour que le mouvement de la structure mécanique puisse suivre le mouvement prévu. En comparaison, le contrôle dans l'espace opérationnel nécessite un niveau de complexité de calcul beaucoup plus élevé dans lequel l'inversion cinématique est incorporée dans le système en boucle fermée.
Le système d'exploitation utilisé, ainsi que diverses approches et circuits basés sur les besoins du moteur et de l'application, sont nécessaires pour contrôler la vitesse et la direction des moteurs. Le but d'un contrôleur de moteur est de pouvoir faire fonctionner un moteur électrique manuellement ou automatiquement (start-stop, inversion, vitesse, torsion et protection contre les Tension surcharges).
Les moteurs traditionnels présentent un certain nombre d'avantages que les moteurs BLDC n'ont pas. Les moteurs synchrones à aimants permanents (PMSM) BLDC et à courant alternatif peuvent fournir la précision et le rendement élevé requis dans un facteur de forme compact. De plus, les moteurs à courant continu à balais et les moteurs à induction à courant alternatif sont faciles à connecter et à utiliser, contrairement aux BLDC et aux PMSM, qui sont plus complexes.


Le kit moteur DRV8301-69M-KIT comprend un Trois phases pilote avec un buck intégré régulateur et amplificateurs shunt de courant. Cliquer pour agrandir l'image. (Source : Texas Instruments Inc.)
Par exemple, les BLDC utilisent des techniques telles que le contrôle vectoriel sans capteur (également appelé contrôle orienté champ, ou FOC) qui offrent une bonne efficacité et l'avantage d'éliminer capteur matériel, réduisant ainsi les coûts et améliorant la fiabilité. Le problème pour les concepteurs est que le contrôle vectoriel sans capteur est compliqué à mettre en œuvre, de sorte que son utilisation peut allonger le temps de développement, augmenter les coûts et éventuellement dépasser les prévisions de délai de mise sur le marché.
Pour résoudre ce dilemme, les concepteurs peuvent se tourner vers des plateformes de développement telles que le DRV8301-69M-KIT kit moteur de Texas Instruments Inc. qui comprend un pilote de grille triphasé DRV8301 intégré à un régulateur abaisseur et des amplificateurs shunt de courant et une carte de microcontrôleur (MCU) Piccolo TMS320F28069M compatible InstaSPIN-FOC et InstaSPIN-MOTION.
Malgré la complexité de la conception, les principaux avantages d'un BLDC découlent de ses caractéristiques de construction. Ils offrent généralement une efficacité de 15 à 20 % supérieure à celle des solutions à balais, nécessitent moins d'entretien en raison de leur conception sans balais et offrent une courbe de couple plate à toutes les vitesses nominales. Dans de nombreuses applications, les moteurs à balais ont été remplacés par des BLDC en raison des récents progrès dans Semi-conducteurs la technologie, les améliorations des aimants permanents et la demande accrue d'une plus grande efficacité.
Pilotes CC
Les BLDC utilisent une commutation électronique, ce qui permet une meilleure commutation de courant. Cela conduit à un plus grand couple, un contrôle précis de la vitesse sur une large plage et des performances de moteur améliorées. Un demi-pont ou un demi-pont en H circuit se trouve dans la plupart des contrôleurs de moteur BLDC. Cette conception de circuit, contrairement à un pont en H, ne comporte que deux commutateurs : un côté haut et un côté bas Transistor.
Des moteurs BLDC monophasés, biphasés et triphasés sont disponibles. Le type triphasé est le plus populaire. Le nombre d'enroulements du stator du moteur est en corrélation avec le nombre de phases, mais les pôles du rotor peuvent être n'importe quel nombre de paires, selon l'application.
Un élément fondamental du contrôle BLDC est le pilote. Il s'agit d'un amplificateur de puissance à sortie de tension qui pilote les circuits côté haut et bas à courant élevé du circuit en demi-pont. IGBT portes.
Un exemple est le Power Integrations 400-W BRD1167 et BRD1267 PontSwitch Des circuits intégrés qui fournissent un courant de phase RMS continu de 1.33 A et un courant de sortie continu FREDFET de 11.5 A. Ils sont autoalimentés et sont fournis dans le boîtier de montage en surface InSOP-24C, tout comme le reste de la famille BridgeSwitch. Ces dispositifs prennent en charge toutes les principales méthodes de contrôle de moteur et de MCU et peuvent faire fonctionner des moteurs synchrones ou asynchrones haute tension monophasés ou multiphasés. Une protection contre les surintensités, les surtensions/sous-tensions et les surchauffes est incluse dans tous les circuits intégrés BridgeSwitch, simplifiant la certification IEC 60335 et IEC 60730.
Un autre exemple est celui de Monolithic Power Systems Inc. MP6612D pilote de moteur réversible qui utilise un pont en H. Il peut faire fonctionner un moteur à courant continu, un enroulement de moteur pas à pas et d'autres charges. Puissance de quatre canaux N mosfet et une pompe de charge interne crée les tensions de commande de grille dans le pont en H. Les broches DIR et ENBL sont utilisées pour contrôler les sorties.

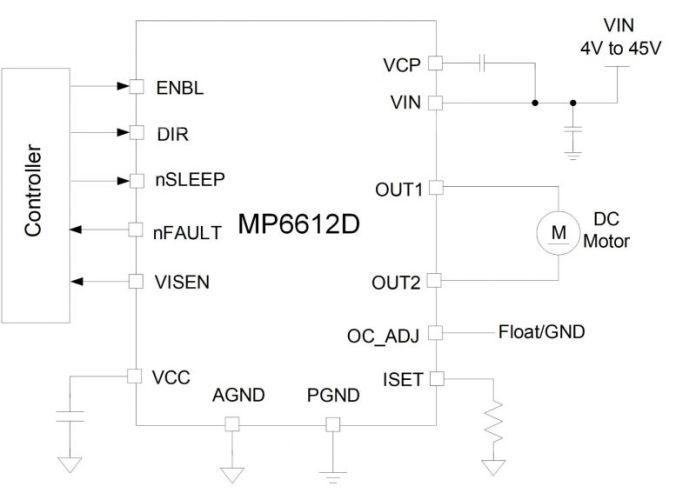
Schéma fonctionnel MP6612D (Source : Monolithic Power Systems Inc.)
Semi-conducteurs à large bande interdite
Des conceptions de moteurs électriques qui extraient des performances supérieures à partir de plates-formes de plus en plus compactes sont nécessaires pour les applications électroniques émergentes. Les circuits de commande de moteur reposant sur des MOSFET et des IGBT au silicium classiques ont du mal à remplir les nouveaux critères. Il devient de plus en plus difficile pour les concepteurs de contrôler les pertes de puissance à mesure que la technologie du silicium approche des limites théoriques de densité de puissance, de tension de claquage et de fréquence de commutation. Les principales conséquences de ces contraintes sont une efficacité réduite et des problèmes de performances supplémentaires à des températures de fonctionnement et des taux de commutation élevés.
Les semi-conducteurs à large bande interdite (WBG) tels que les dispositifs au carbure de silicium (SiC) et au nitrure de gallium (GaN) sont utilisés dans la commande de moteur car ils offrent une commutation plus rapide qui peut être nécessaire pour les moteurs fonctionnant à des fréquences fondamentales élevées et nécessitant une ondulation bien filtrée. Cependant, les vitesses de commutation élevées atteintes par les dispositifs WBG, tout en offrant des rendements de conversion plus élevés, génèrent également des variations de tension très rapides qui entraînent des taux de changement de tension élevés (dV/dt) pouvant stresser l'isolation des enroulements du moteur. Les applications de l'électronique de puissance ont donc deux objectifs principaux : la gestion des problèmes thermiques et la réduction de la taille du système.
Des fabricants comme Texas Instruments ont développé des dispositifs d'alimentation intégrés GaN qui aident à obtenir les meilleures performances des dispositifs WBG. Par exemple, le LMG5200 fournit un étage de puissance en demi-pont GaN de 80 V avec des FET GaN à mode d'amélioration. Le dispositif se compose de deux FET GaN alimentés par un pilote FET GaN haute fréquence dans un arrangement en demi-pont.
TI fournit le TIDA-00909, une conception de référence pour les entraînements de moteur à haute fréquence utilisant un onduleur triphasé avec trois LMG5200, pour faciliter la conception avec l'appareil. Pour une évaluation simple des performances, le TIDA-00909 est livré avec une interface appropriée pour se connecter à un kit de développement C2000 MCU LaunchPad.

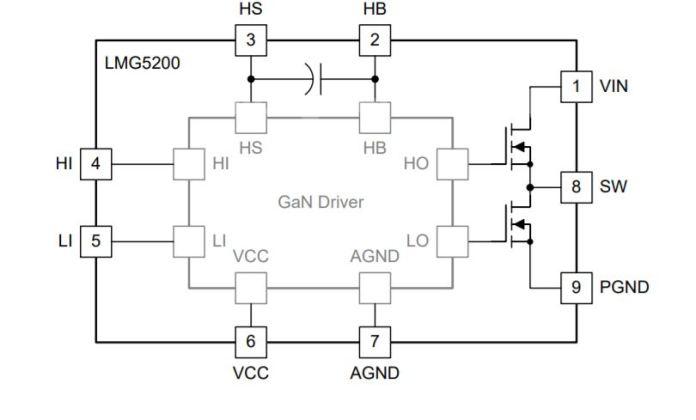
Schéma fonctionnel du LMG5200 (Source : Texas Instruments Inc.)


Carte de puissance EPC9146. Cliquer pour agrandir l'image. (Source : EPC)
Un autre exemple est l'EPC EPC9146 carte d'alimentation, qui intègre l'étage ePower monolithique EPC2152 avec un pilote de grille intégré utilisant la technologie GaN IC propriétaire d'EPC, et fournit une tension de dispositif maximale de 80 V et un courant de sortie maximal de 15 A. Avec une fréquence PWM allant jusqu'à 3 MHz, il peut fonctionner à pleine charge. L'EPC9146 offre des fonctionnalités pour les applications de commande de puissance, telles qu'un étage de puissance monolithique avec un pilote de grille intégré, des rails d'alimentation auxiliaires régulés pour les alimentations domestiques, une détection de tension et de température, une détection précise du courant et des fonctions de protection.
L'EPC9146 peut être associé à des cartes d'accouplement de la série EPC9147 pour permettre à l'utilisateur de contrôler la carte d'alimentation directement via une carte MCU grand public, en exploitant les ressources existantes à des fins de développement rapide.
La complexité d'un robot nécessite le bon conducteur pour remplir sa fonction correctement liée à l'application industrielle. Les semi-conducteurs WBG sont utilisés dans la commande de moteur car ils permettent une commutation plus rapide, ce qui est nécessaire pour les moteurs fonctionnant à des fréquences fondamentales élevées. Plutôt que de créer un système de propulsion compliqué, les ingénieurs préfèrent se concentrer sur ce qui distingue la conception de leur gadget.
à propos de la conversion efficace de l'énergie (EPC)Systèmes d'alimentation monolithiquesIntégrations électriquesTexas Instruments