Motor listrik adalah perangkat yang mengubah energi listrik menjadi energi mekanik, yang dapat digunakan untuk menggerakkan sistem artikulasi. Motor listrik harus mampu menghasilkan torsi besar pada kecepatan rendah dan sangat efisien di seluruh rentang beban. Ini juga membutuhkan kontrol langsung dan mekanisme mengemudi. Meskipun memerlukan kontrol yang lebih kompleks, motor DC brushless (BLDC) menemukan rumah dalam aplikasi robot karena kinerjanya yang lebih baik.
Motor BLDC semakin populer di seluruh dunia berkat biaya produksinya yang lebih rendah. Kedatangan drone konsumen dan e-bike, khususnya, telah mengakibatkan adopsi motor BLDC secara luas, yang sebelumnya hanya digunakan dalam aplikasi industri kelas atas.
Insinyur yang mengembangkan aplikasi motor BLDC ini telah berubah selama dua dekade terakhir, seperti halnya kontrol motor. Insinyur saat ini lebih memilih untuk berkonsentrasi pada apa yang membuat desain perangkat mereka unik daripada membangun sistem propulsi yang kompleks. Insinyur berfokus pada desain yang lebih ramping dengan faktor bentuk minimal, antarmuka pengguna yang intuitif, kemampuan waktu nyata, keamanan fungsional, dan berbagi data di cloud.
Masalah kontrol
Bagian penting dari sistem robot adalah pengontrol motor. Beberapa strategi pengendalian dapat digunakan untuk mengoperasikan manipulator robot, atau lengan robot. Itu teknologi digunakan dan bagaimana penerapannya dapat mempunyai dampak yang besar terhadap kinerja manipulator dan, sebagai hasilnya, pada jangkauan aplikasi yang layak. Sebaliknya, desain mekanis manipulator dan sistem aktuasi mempengaruhi jenis skema kontrol yang dapat digunakan.
Sementara pekerjaan robot biasanya dinyatakan dalam ruang operasional, tindakan kontrol diimplementasikan di ruang gabungan dalam hal gerakan berbagai bagian robot. Akibatnya, masuk akal untuk memeriksa dua jenis skema kontrol: satu untuk ruang bersama dan satu lagi untuk ruang operasional. Struktur pengontrol adalah sistem kontrol loop tertutup di kedua skema untuk memanfaatkan manfaat umpan balik dalam hal ketahanan terhadap efek potensial yang tidak diketahui pada model dan meminimalkan efek gangguan seperti kebisingan.
Masalah kontrol ruang bersama memerlukan pemecahan kinematika terbalik manipulator untuk mengubah persyaratan gerak dari operasional ke ruang bersama. Skema kontrol kemudian dibuat agar gerakan struktur mekanik dapat mengikuti gerakan yang diinginkan. Sebagai perbandingan, kontrol di ruang operasional memerlukan tingkat kompleksitas komputasi yang jauh lebih tinggi di mana inversi kinematik dimasukkan ke dalam sistem loop tertutup.
Sistem operasi yang digunakan, serta berbagai pendekatan dan sirkuit berdasarkan kebutuhan motor dan aplikasi, diperlukan untuk mengendalikan kecepatan dan arah motor. Pengendali motor bertujuan untuk dapat mengoperasikan motor listrik secara manual atau otomatis (start-stop, inversi, kecepatan, puntir, dan perlindungan terhadap tegangan kelebihan beban).
Motor tradisional memiliki sejumlah keunggulan yang tidak dimiliki motor BLDC. BLDC dan motor sinkron magnet permanen (PMSM) yang digerakkan AC dapat memberikan presisi yang diperlukan dan efisiensi tinggi dalam faktor bentuk yang ringkas. Selain itu, motor DC tipe sikat dan motor induksi AC mudah dihubungkan dan dioperasikan, tidak seperti BLDC dan PMSM, yang lebih kompleks.


Kit mesin DRV8301-69M-KIT mencakup: Tiga fase driver dengan uang terintegrasi pengatur dan penguat shunt arus. Klik untuk gambar yang lebih besar. (Sumber: Texas Instruments Inc.)
Misalnya, BLDC menggunakan teknik seperti kontrol vektor tanpa sensor (juga disebut kontrol berorientasi lapangan, atau FOC) yang menawarkan efisiensi yang baik dan keuntungan menghilangkan Sensor perangkat keras, sehingga mengurangi biaya dan meningkatkan keandalan. Masalah bagi desainer adalah bahwa kontrol vektor tanpa sensor rumit untuk diterapkan, sehingga penggunaannya dapat memperpanjang waktu pengembangan, menambah biaya, dan mungkin melebihi perkiraan waktu-ke-pasar.
Untuk mengatasi dilema ini, desainer dapat beralih ke platform pengembangan seperti DRV8301-69M-KIT kit mesin dari Texas Instruments Inc. yang mencakup driver gerbang tiga fase DRV8301 yang terintegrasi dengan regulator buck dan amplifier shunt arus dan papan mikrokontroler (MCU) Piccolo TMS320F28069M yang diaktifkan InstaSPIN-FOC dan InstaSPIN-MOTION.
Terlepas dari kerumitan desain, manfaat utama BLDC muncul dari fitur konstruksinya. Mereka biasanya menawarkan efisiensi 15% hingga 20% lebih tinggi daripada solusi yang disikat, membutuhkan lebih sedikit perawatan karena desainnya yang tanpa sikat, dan menghasilkan kurva torsi datar pada semua kecepatan terukur. Dalam banyak aplikasi, motor yang disikat telah digantikan oleh BLDC karena kemajuan terbaru dalam Semikonduktor teknologi, peningkatan magnet permanen, dan peningkatan permintaan untuk efisiensi yang lebih tinggi.
driver DC
BLDC menggunakan pergantian elektronik, yang memungkinkan peralihan arus yang lebih baik. Ini mengarah pada torsi yang lebih besar, kontrol kecepatan yang akurat pada rentang yang luas, dan peningkatan kinerja motor. Setengah-jembatan atau setengah-H-jembatan sirkit ditemukan di sebagian besar pengontrol motor BLDC. Desain sirkuit ini, tidak seperti jembatan-H, hanya memiliki dua sakelar: satu sisi tinggi dan satu sisi rendah Transistor.
Tersedia motor BLDC fase tunggal, dua fase, dan tiga fase. Tipe tiga fase adalah yang paling populer. Jumlah belitan stator motor berkorelasi dengan jumlah fase, tetapi kutub rotor dapat berupa sejumlah pasangan, tergantung pada aplikasinya.
Komponen mendasar dari kendali BLDC adalah pengemudi. Ini adalah penguat daya keluaran tegangan yang menggerakkan sisi tinggi dan sisi rendah arus tinggi dari rangkaian setengah jembatan. IGBT gerbang.
Salah satu contohnya adalah Integrasi Daya 400-W BRD1167 dan BRD1267 JembatanSwitch IC yang memberikan arus fase RMS kontinu 1.33 A dan arus keluaran FREDFET DC 11.5 A. IC ini memiliki daya sendiri dan tersedia dalam paket pemasangan permukaan InSOP-24C, sama seperti rangkaian BridgeSwitch lainnya. Perangkat ini mendukung semua MCU utama dan metode kontrol motor dan dapat mengoperasikan motor sinkron atau asinkron tegangan tinggi fase tunggal atau multi fase. Perlindungan arus berlebih, tegangan berlebih/kurang, dan suhu berlebih disertakan di semua IC BridgeSwitch, menyederhanakan sertifikasi IEC 60335 dan IEC 60730.
Contoh lain adalah Monolithic Power Systems Inc MP6612D driver motor reversibel yang menggunakan jembatan-H. Dapat mengoperasikan motor DC, belitan motor stepper, dan beban lainnya. Empat N-channel power MOSFET dan pompa muatan internal membuat tegangan penggerak gerbang di jembatan-H. Pin DIR dan ENBL digunakan untuk mengontrol output.

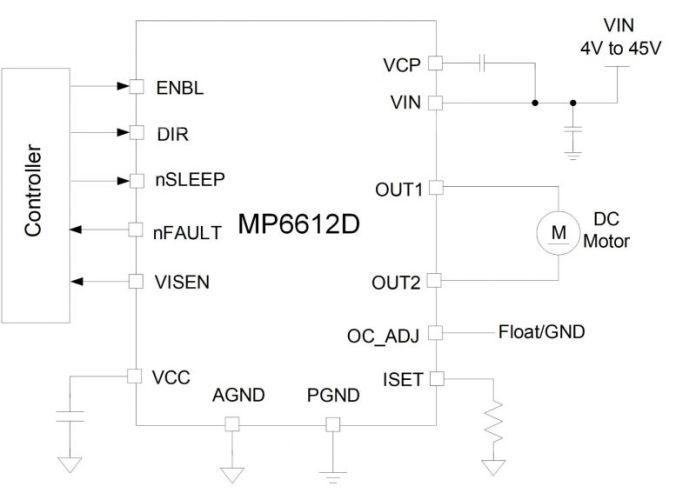
Diagram blok MP6612D (Sumber: Monolithic Power Systems Inc.)
Semikonduktor celah pita lebar
Desain motor listrik yang mengekstrak kinerja lebih tinggi dari platform yang semakin kompak diperlukan untuk aplikasi elektronik yang sedang berkembang. Sirkuit driver motor yang mengandalkan MOSFET silikon klasik dan IGBT sedang berjuang untuk memenuhi kriteria baru. Hal ini menjadi lebih sulit bagi desainer untuk menjaga kerugian daya di bawah kontrol sebagai teknologi silikon mendekati batas teoritis untuk kepadatan daya, tegangan tembus, dan frekuensi switching. Konsekuensi utama dari kendala ini adalah pengurangan efisiensi dan masalah kinerja tambahan pada suhu operasi yang tinggi dan tingkat switching.
Semikonduktor celah pita lebar (WBG) seperti perangkat silikon karbida (SiC) dan galium nitrida (GaN) digunakan dalam kontrol motor karena mereka menyediakan peralihan yang lebih cepat yang mungkin diperlukan untuk motor yang beroperasi pada frekuensi dasar yang tinggi dan memerlukan riak yang disaring dengan baik. Namun, kecepatan switching tinggi yang dicapai oleh perangkat WBG, sementara menawarkan efisiensi konversi yang lebih tinggi, juga menghasilkan variasi tegangan yang sangat cepat yang menghasilkan tingkat perubahan tegangan tinggi (dV/dt) yang dapat menekan isolasi belitan motor. Oleh karena itu, aplikasi daya-elektronik memiliki dua tujuan utama: mengelola masalah termal dan mengurangi ukuran sistem.
Produsen seperti Texas Instruments telah mengembangkan perangkat daya terintegrasi GaN yang membantu mendapatkan kinerja terbaik dari perangkat WBG. Misalnya, LMG5200 menyediakan tahap daya setengah jembatan GaN 80-V dengan FET GaN mode peningkatan. Perangkat ini terdiri dari dua GaN FET yang ditenagai oleh satu driver GaN FET frekuensi tinggi dalam pengaturan setengah jembatan.
TI memasok TIDA-00909, desain referensi untuk penggerak motor frekuensi tinggi yang menggunakan inverter tiga fase dengan tiga LMG5200, untuk mempermudah perancangan dengan perangkat. Untuk penilaian kinerja sederhana, TIDA-00909 hadir dengan antarmuka yang sesuai untuk menghubungkan ke kit pengembangan LaunchPad C2000 MCU.

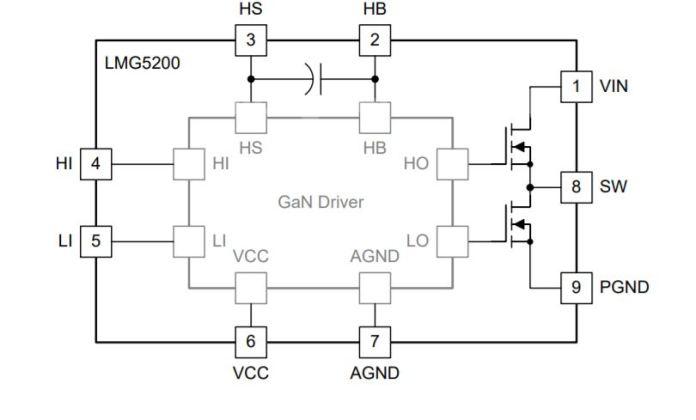
Diagram blok LMG5200 (Sumber: Texas Instruments Inc.)


Papan daya EPC9146. Klik untuk gambar yang lebih besar. (Sumber: EPC)
Contoh lainnya adalah EPC EPC9146 papan daya, yang menggabungkan EPC2152 monolitik ePower Stage dengan driver gerbang terintegrasi menggunakan teknologi IC GaN milik EPC, dan memberikan tegangan perangkat maksimum 80-V dan arus keluaran maksimum 15-A. Dengan frekuensi PWM hingga 3 MHz, dapat berjalan pada beban penuh. EPC9146 menawarkan fitur untuk aplikasi penggerak daya, seperti panggung daya monolitik dengan driver gerbang terintegrasi, rel daya tambahan yang diatur untuk suplai rumah tangga, sensor tegangan dan suhu, sensor arus presisi, dan fungsi pelindung.
EPC9146 dapat dipasangkan dengan papan kawin seri EPC9147 untuk memungkinkan pengguna mengontrol papan daya secara langsung melalui papan MCU arus utama, memanfaatkan sumber daya yang ada untuk tujuan pengembangan cepat.
Kompleksitas sebuah robot membutuhkan driver yang tepat untuk menjalankan fungsinya dengan baik terkait dengan aplikasi industri. Semikonduktor WBG digunakan dalam kontrol motor karena memungkinkan perpindahan yang lebih cepat, yang diperlukan untuk motor yang beroperasi pada frekuensi dasar yang tinggi. Daripada membuat sistem propulsi yang rumit, para insinyur lebih memilih untuk fokus pada apa yang membuat desain gadget mereka berbeda.
tentang Konversi Daya Efisien (EPC)Sistem Tenaga MonolitikIntegrasi Daya Instrumen Texas