Motores elétricos são dispositivos que transformam energia elétrica em energia mecânica, que pode ser usada para movimentar sistemas articulados. O motor elétrico deve ser capaz de produzir torque substancial em baixas velocidades e ser extremamente eficiente em toda a faixa de carga. Também requer um controle direto e mecanismo de direção. Embora exijam um controle mais complexo, os motores DC sem escova (BLDCs) estão encontrando lares em aplicações robóticas devido ao seu melhor desempenho.
Os motores BLDC estão ganhando popularidade em todos os setores, graças aos seus custos de produção mais baixos. A chegada de drones e e-bikes, em particular, resultou na adoção generalizada de motores BLDC, que antes eram usados apenas em aplicações industriais de ponta.
Os engenheiros que estão desenvolvendo essas aplicações de motores BLDC mudaram nas últimas duas décadas, tanto quanto o controle do motor. O engenheiro de hoje prefere se concentrar no que torna o design de seu dispositivo único, em vez de construir um sistema de propulsão complexo. Os engenheiros estão se concentrando em designs mais elegantes com um fator de forma mínimo, interfaces de usuário intuitivas, recursos em tempo real, segurança funcional e compartilhamento de dados na nuvem.
O problema de controle
Uma parte significativa de um sistema robótico é o controlador do motor. Várias estratégias de controle podem ser usadas para operar um manipulador robótico ou braço robótico. O tecnologia utilizado e como ele é implementado pode ter um impacto considerável no desempenho do manipulador e, como resultado, na gama de aplicações viáveis. O projeto mecânico do manipulador e o sistema de atuação, por outro lado, influenciam o tipo de esquema de controle que pode ser utilizado.
Enquanto o trabalho do robô é tipicamente declarado em um espaço operacional, as ações de controle são implementadas no espaço articular em termos do movimento das várias partes do robô. Como resultado, é razoável examinar dois tipos de esquemas de controle: um para espaço de junta e outro para espaço operacional. A estrutura do controlador é um sistema de controle de malha fechada em ambos os esquemas para alavancar os benefícios do feedback em termos de resiliência a potenciais efeitos desconhecidos no modelo e minimização de efeitos de perturbação, como ruído.
A questão do controle do espaço da junta envolve a resolução da cinemática inversa do manipulador para converter os requisitos de movimento do espaço operacional para o espaço da junta. O esquema de controle é então criado para que o movimento da estrutura mecânica possa seguir o movimento pretendido. Em comparação, o controle no espaço operacional necessita de um nível muito mais alto de complexidade computacional em que a inversão cinemática é incorporada ao sistema de malha fechada.
O sistema operacional em uso, bem como várias abordagens e circuitos com base nas necessidades do motor e da aplicação, são necessários para controlar a velocidade e a direção dos motores. O objetivo de um controlador de motor é ser capaz de operar um motor elétrico manual ou automaticamente (partida-parada, inversão, velocidade, torção e proteção contra Voltagem sobrecargas).
Os motores tradicionais têm vários benefícios que os motores BLDC não têm. Os motores síncronos de ímã permanente acionados por BLDC e CA (PMSMs) podem fornecer a precisão necessária e a alta eficiência em um formato compacto. Além disso, os motores DC tipo escova e os motores de indução AC são fáceis de conectar e operar, ao contrário dos BLDCs e PMSMs, que são mais complexos.


O kit de motor DRV8301-69M-KIT inclui um Trifásico motorista com um fanfarrão integrado regulador e amplificadores shunt de corrente. Clique para ampliar a imagem. (Fonte: Texas Instruments Inc.)
Por exemplo, os BLDCs usam técnicas como o controle vetorial sem sensores (também chamado de controle orientado a campo, ou FOC) que oferecem boa eficiência e a vantagem de eliminar sensor hardware, reduzindo custos e melhorando a confiabilidade. O problema para os projetistas é que o controle vetorial sem sensores é complicado de implementar, portanto, seu uso pode prolongar o tempo de desenvolvimento, adicionando custos e, possivelmente, excedendo as previsões de lançamento no mercado.
Para resolver esse dilema, os designers podem recorrer a plataformas de desenvolvimento como o DRV8301-69M-KIT kit de motor da Texas Instruments Inc. que inclui um driver de gate trifásico DRV8301 integrado com um regulador de buck e amplificadores shunt de corrente e uma placa de microcontrolador Piccolo TMS320F28069M (MCU) habilitada para InstaSPIN-FOC e InstaSPIN-MOTION.
Apesar da complexidade do projeto, os principais benefícios de um BLDC surgem de suas características de construção. Eles normalmente oferecem uma eficiência de 15% a 20% mais alta do que as soluções com escovas, precisam de menos manutenção devido ao seu design sem escovas e fornecem uma curva de torque plana em todas as velocidades nominais. Em muitas aplicações, os motores com escovas foram substituídos por BLDCs devido aos avanços recentes em Semicondutores tecnologia, melhorias em ímãs permanentes e aumento da demanda por maior eficiência.
Drivers DC
Os BLDCs usam comutação eletrônica, o que permite uma melhor comutação de corrente. Isso leva a maior torque, controle de velocidade preciso em uma ampla faixa e melhor desempenho do motor. Uma meia ponte ou meia ponte H o circuito é encontrado na maioria dos controladores de motor BLDC. Este projeto de circuito, ao contrário de uma ponte H, tem apenas dois interruptores: um lado alto e um lado baixo Transistor.
Estão disponíveis motores BLDC monofásicos, bifásicos e trifásicos. O tipo trifásico é o mais popular. O número de enrolamentos do estator do motor está correlacionado ao número de fases, mas os pólos do rotor podem ser qualquer número de pares, dependendo da aplicação.
Um componente fundamental do controle BLDC é o driver. É um amplificador de potência de saída de tensão que aciona o lado alto e o lado baixo de alta corrente do circuito de meia ponte. IGBT portões.
Um exemplo são as integrações de energia 400-W BRD1167 e BRD1267 BridgeSwitch ICs que fornecem uma corrente de fase RMS contínua de 1.33 A e uma corrente de saída FREDFET DC de 11.5 A. Eles são autoalimentados e vêm no pacote de montagem em superfície InSOP-24C, assim como o resto da família BridgeSwitch. Esses dispositivos suportam todos os principais métodos de controle de motor e MCU e podem operar motores síncronos ou assíncronos de alta tensão monofásicos ou multifásicos. Proteção de sobrecorrente, sobretensão / subtensão e sobretemperatura estão incluídas em todos os CIs BridgeSwitch, simplificando a certificação IEC 60335 e IEC 60730.
Outro exemplo é o da Monolithic Power Systems Inc. MP6612D driver de motor reversível que usa uma ponte H. Ele pode operar um motor CC, um enrolamento de motor de passo e outras cargas. Potência de quatro canais N mosfet e uma bomba de carga interna cria as tensões do controlador de porta na ponte H. Os pinos DIR e ENBL são usados para controlar as saídas.

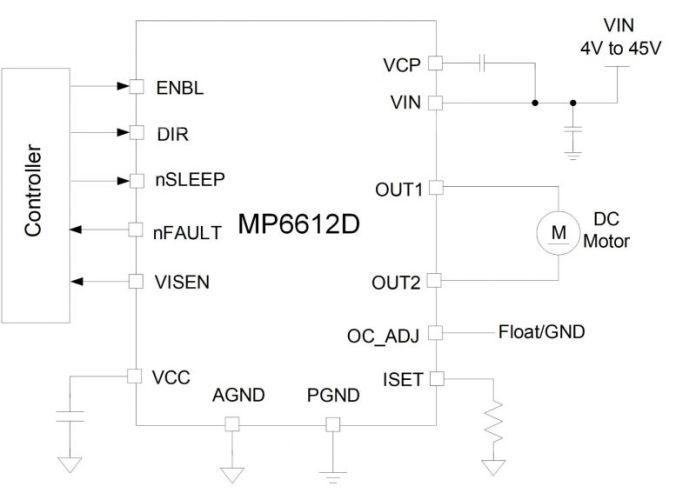
Diagrama de blocos MP6612D (Fonte: Monolithic Power Systems Inc.)
Semicondutores de largura de banda larga
Projetos de motores elétricos que extraem alto desempenho de plataformas cada vez mais compactas são necessários para aplicações eletrônicas emergentes. Os circuitos do driver de motor que contam com os clássicos MOSFETs e IGBTs de silício estão lutando para cumprir os novos critérios. Está se tornando mais difícil para os projetistas manter as perdas de energia sob controle à medida que a tecnologia de silício se aproxima dos limites teóricos de densidade de energia, tensão de ruptura e frequência de chaveamento. As principais consequências dessas restrições são eficiência reduzida e problemas de desempenho adicionais em altas temperaturas de operação e taxas de comutação.
Semicondutores de largura de banda larga (WBG), como carboneto de silício (SiC) e dispositivos de nitreto de gálio (GaN), são usados no controle do motor porque fornecem comutação mais rápida que pode ser necessária para motores operando em altas frequências fundamentais e exigindo ondulação bem filtrada. No entanto, as altas velocidades de chaveamento alcançadas pelos dispositivos WBG, embora ofereçam maior eficiência de conversão, também geram variações de tensão muito rápidas que resultam em taxas de mudança de alta tensão (dV / dt) que podem sobrecarregar o isolamento dos enrolamentos do motor. As aplicações da eletrônica de potência, portanto, têm dois objetivos principais: gerenciar problemas térmicos e reduzir o tamanho do sistema.
Fabricantes como a Texas Instruments desenvolveram dispositivos integrados de energia GaN que ajudam a obter o melhor desempenho dos dispositivos WBG. Por exemplo, o LMG5200 fornece um estágio de energia de meia ponte de 80 V GaN com FETs de GaN de modo de aprimoramento. O dispositivo consiste em dois GaN FETs alimentados por um driver GaN FET de alta frequência em um arranjo de meia ponte.
A TI fornece o TIDA-00909, um projeto de referência para acionamentos de motores de alta frequência que utilizam um inversor trifásico com três LMG5200s, para tornar o projeto do dispositivo mais fácil. Para uma avaliação de desempenho simples, o TIDA-00909 vem com uma interface adequada para conexão a um kit de desenvolvimento C2000 MCU LaunchPad.

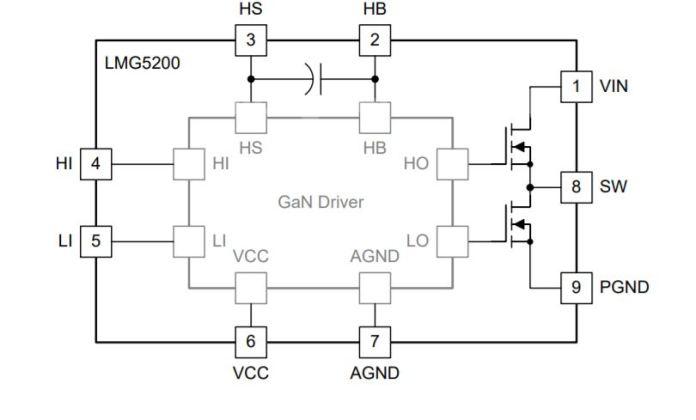
Diagrama de blocos LMG5200 (Fonte: Texas Instruments Inc.)


Placa de alimentação EPC9146. Clique para uma imagem maior. (Fonte: EPC)
Outro exemplo são os EPC's EPC9146 placa de energia, que incorpora o EPC2152 monolítico ePower Stage com um gate driver integrado usando a tecnologia GaN IC proprietária da EPC e fornece uma tensão máxima de dispositivo de 80 V e uma corrente de saída máxima de 15 A. Com uma frequência PWM de até 3 MHz, ele pode funcionar em plena carga. O EPC9146 oferece recursos para aplicações de acionamento de energia, como um estágio de energia monolítico com um gate-driver integrado, trilhos de energia auxiliares regulados para fontes de manutenção, detecção de tensão e temperatura, detecção precisa de corrente e funções de proteção.
O EPC9146 pode ser emparelhado com as placas correspondentes da série EPC9147 para permitir ao usuário controlar a placa de energia diretamente por meio de uma placa MCU principal, aproveitando os recursos existentes para fins de desenvolvimento rápido.
A complexidade de um robô requer o driver certo para desempenhar sua função adequadamente relacionada à aplicação industrial. Os semicondutores WBG são empregados no controle de motores porque permitem comutação mais rápida, que é necessária para motores operando em altas frequências fundamentais. Em vez de criar um sistema de propulsão complicado, os engenheiros preferem se concentrar no que torna o design de seu dispositivo diferente.
sobre Efficient Power Conversion (EPC)Sistemas de energia monolíticosIntegrações de energiaTexas Instruments