מנועים חשמליים הם מכשירים שהופכים אנרגיה חשמלית לאנרגיה מכנית, אשר עשויה לשמש להנעת מערכות מפרקיות. המנוע החשמלי חייב להיות מסוגל לייצר מומנט משמעותי במהירויות נמוכות ולהיות יעיל ביותר בכל טווח העומס. זה גם דורש מנגנון שליטה ונהיגה פשוטים. למרות שהם דורשים שליטה מורכבת יותר, מנועי DC חסרי מברשות (BLDC) מוצאים בתים ביישומים רובוטיים בשל הביצועים הטובים יותר שלהם.
מנועי BLDC צוברים פופולריות ברחבי הלוח הודות לעלויות הייצור הנמוכות שלהם. הגעתם של רחפנים לצרכנים ואופניים חשמליים, בפרט, הביאה לאימוץ נרחב של מנועי BLDC, אשר שימשו בעבר ביישומים תעשייתיים מתקדמים בלבד.
מהנדסים שמפתחים את יישומי המנוע הללו של BLDC השתנו במהלך שני העשורים האחרונים, כמו בקרת המנוע. המהנדס של היום מעדיף להתרכז במה שהופך את עיצוב המכשיר שלהם לייחודי במקום לבנות מערכת הנעה מורכבת. המהנדסים מתמקדים בעיצובים אלגנטיים יותר עם גורם צורה מינימלי, ממשקי משתמש אינטואיטיביים, יכולות בזמן אמת, בטיחות פונקציונלית ושיתוף נתונים בענן.
בעיית השליטה
חלק משמעותי ממערכת רובוטית הוא בקר המנוע. ניתן להשתמש במספר אסטרטגיות בקרה להפעלת מניפולטור רובוטי, או זרוע רובוטית. ה טֶכנוֹלוֹגִיָה השימוש והאופן שבו הוא מיושם יכולים להיות בעלי השפעה ניכרת על ביצועי המניפולטור, וכתוצאה מכך, על מגוון היישומים הבריאים. העיצוב המכני של המניפולטור ומערכת ההפעלה, לעומת זאת, משפיעים על סוג ערכת הבקרה שבה ניתן להשתמש.
בעוד שתפקיד הרובוט נאמר בדרך כלל במרחב תפעולי, פעולות הבקרה מיושמות במרחב המשותף מבחינת התנועה של חלקי הרובוט השונים. כתוצאה מכך, סביר לבחון שני סוגים של תוכניות בקרה: אחת למרחב משותף ואחרת למרחב תפעולי. מבנה הבקר הוא מערכת בקרה בלולאה סגורה בשתי הסכמות כדי למנף את היתרונות של משוב במונחים של עמידות בפני השפעות לא ידועות פוטנציאליות על המודל ומזעור השפעות הפרעות כגון רעש.
סוגיית השליטה במרחב המשותף כרוכה בפתרון הקינמטיקה ההפוכה של המניפולטור כדי להמיר את דרישות התנועה מהמרחב התפעולי למפרק. לאחר מכן נוצרת ערכת הבקרה כך שתנועת המבנה המכני תוכל לעקוב אחר התנועה המיועדת. לשם השוואה, שליטה במרחב התפעולי מחייבת רמה גבוהה בהרבה של מורכבות חישובית שבה היפוך הקינמטי משולב במערכת הלולאה הסגורה.
מערכת ההפעלה הנמצאת בשימוש, כמו גם גישות ומעגלים שונים המבוססים על צרכי המנוע והיישום, נדרשים לשליטה במהירות ובכיוון המנועים. מטרתו של בקר מנוע היא להיות מסוגל להפעיל מנוע חשמלי באופן ידני או אוטומטי (התחלה-עצירה, היפוך, מהירות, פיתול והגנה מפני מתח עומסי יתר).
למנועים מסורתיים יש מספר יתרונות שאין למנועי BLDC. מנועים סינכרוניים מגנטים קבועים (PMSM) המונעים על ידי BLDC ו-AC יכולים לספק את הדיוק הנדרש והיעילות הגבוהה בגורם צורה קומפקטי. בנוסף, מנועי DC מסוג מברשת ומנועי אינדוקציה AC קלים לחיבור ולתפעול, בניגוד ל-BLDCs ו-PMSMs, שהם מורכבים יותר.


ערכת המנוע DRV8301-69M-KIT כוללת א תלת פאזי נהג עם באק משולב וסת ומגברי שונט זרם. לחץ לתמונה גדולה יותר. (מקור: Texas Instruments Inc.)
לדוגמה, BLDCs משתמשים בטכניקות כגון בקרת וקטור ללא חיישנים (נקראת גם בקרה מכוונת שדה, או FOC) המציעות יעילות טובה ואת היתרון של חיסול חיישן חומרה, ובכך להפחית עלויות ולשפר את האמינות. הבעיה של מעצבים היא ששליטה וקטורית ללא חיישנים היא מסובכת ליישום, כך שהשימוש בה יכול להאריך את זמן הפיתוח, להוסיף עלות ואולי לעלות על תחזיות הזמן לשוק.
כדי לפתור את הדילמה הזו, מעצבים יכולים לפנות לפלטפורמות פיתוח כגון DRV8301-69M-KIT ערכת מנוע מבית Texas Instruments Inc. הכוללת דרייבר שער תלת פאזי DRV8301 משולב עם ווסת buck ומגברי shunt זרם ולוח מיקרו-בקר Piccolo TMS320F28069M (MCU) מאופשר InstaSPIN-FOC ו-InstaSPIN-MOTION.
למרות המורכבות העיצובית, היתרונות העיקריים של BLDC נובעים מתכונות הבנייה שלו. הם בדרך כלל מציעים יעילות גבוהה ב-15% עד 20% מפתרונות מוברש, זקוקים פחות תחזוקה בשל העיצוב חסר המברשות שלהם, ומספקים עקומת מומנט שטוחה בכל המהירויות הנקובות. ביישומים רבים, מנועים מוברשים הוחלפו ב-BLDCs עקב ההתקדמות האחרונה בתחום סמיקונדקטור טכנולוגיה, שיפורים במגנטים קבועים ודרישה מוגברת ליעילות גבוהה יותר.
דרייברים של DC
BLDCs משתמשים בקומוטציה אלקטרונית, המאפשרת מיתוג זרם טוב יותר. זה מוביל למומנט גדול יותר, בקרת מהירות מדויקת בטווח רחב ושיפור ביצועי המנוע. חצי גשר או חצי גשר ח' מעגל נמצא ברוב בקרי המנוע של BLDC. עיצוב מעגל זה, בניגוד לגשר H, יש רק שני מתגים: אחד גבוה וצד נמוך טרנזיסטור.
מנועי BLDC חד פאזיים, דו פאזיים ותלת פאזיים זמינים. הסוג התלת פאזי הוא הפופולרי ביותר. מספר הפיתולים של סטאטור המנוע תואם למספר השלבים, אך עמודי הרוטור עשויים להיות כל מספר של זוגות, בהתאם ליישום.
מרכיב בסיסי של בקרת BLDC הוא הנהג. זהו מגבר כוח פלט המניע את הזרם הגבוה והצד הנמוך של מעגל חצי הגשר IGBT שערים.
דוגמה אחת היא Power Integrations 400-W BRD1167 ו-BRD1267 BridgeSwitch ICs המספקים זרם פאזה RMS רציף של 1.33 A וזרם פלט FREDFET DC של 11.5 A. הם מופעלים בכוח עצמי ומגיעים בחבילת ההתקנה על פני השטח InSOP-24C, בדיוק כמו שאר משפחת BridgeSwitch. התקנים אלה תומכים בכל שיטות ה-MCU והבקרת המנוע העיקריות ויכולים להפעיל מנועים סינכרוניים או אסינכרוניים במתח גבוה חד-פאזי או רב-פאזי. הגנת זרם-יתר, מתח-יתר וטמפרטורת-יתר כלולים בכל ה-BridgeSwitch IC, מה שמפשט את ההסמכה של IEC 60335 ו-IEC 60730.
דוגמה נוספת היא של Monolithic Power Systems Inc MP6612D נהג מנוע הפיך המשתמש בגשר H. זה יכול להפעיל מנוע DC, סלילה מנוע צעד ועומסים אחרים. כוח ארבע N ערוצים מוספים ומשאבת מטען פנימית יוצרת את מתחי הנהג של השער בגשר H. פיני DIR ו-ENBL משמשים לשליטה ביציאות.

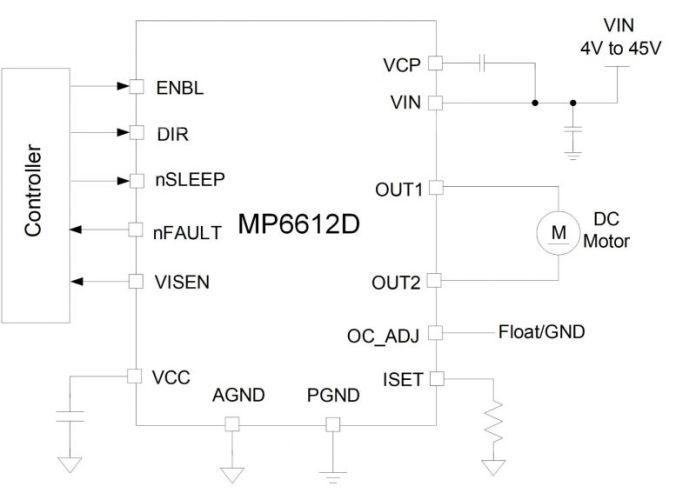
דיאגרמת בלוקים MP6612D (מקור: Monolithic Power Systems Inc.)
מוליכים למחצה רחבי פס
תכנוני מנועים חשמליים המוציאים ביצועים גבוהים יותר מפלטפורמות יותר ויותר קומפקטיות נדרשים ליישומים אלקטרוניים מתפתחים. מעגלי נהג מנוע המסתמכים על MOSFET ו-IGBT קלאסיים מסיליקון נאבקים לעמוד בקריטריונים החדשים. זה הופך להיות קשה יותר עבור מעצבים לשמור על הפסדי הספק תחת שליטה כאשר טכנולוגיית הסיליקון מתקרבת לגבולות תיאורטיים של צפיפות הספק, מתח פירוק ותדירות מיתוג. ההשלכות העיקריות של אילוצים אלו הן יעילות מופחתת ובעיות ביצועים נוספות בטמפרטורות עבודה גבוהות וקצבי מיתוג.
מוליכים למחצה רחבי פס (WBG) כגון סיליקון קרביד (SiC) וגליום ניטריד (GaN) משמשים בבקרת מנוע מכיוון שהם מספקים מיתוג מהיר יותר שעשוי להידרש עבור מנועים הפועלים בתדרים בסיסיים גבוהים ודורשים אדווה מסוננת היטב. עם זאת, מהירויות המיתוג הגבוהות שהושגו על ידי מכשירי WBG, תוך שהם מציעים יעילות המרה גבוהה יותר, מייצרות גם וריאציות מתח מהירות מאוד הגורמות לשיעורי שינוי מתח גבוה (dV/dt) שיכולים להלחיץ את הבידוד של פיתולי המנוע. לפיכך, ליישומי כוח אלקטרוניים יש שתי מטרות עיקריות: ניהול בעיות תרמיות והקטנת גודל המערכת.
יצרנים כמו טקסס אינסטרומנטס פיתחו מכשירי כוח משולבים GaN שעוזרים לקבל את הביצועים הטובים ביותר ממכשירי WBG. לדוגמה, ה LMG5200 מספק שלב הספק 80V GaN חצי גשר עם GaN FETs במצב שיפור. המכשיר מורכב משני GaN FETs המופעלים על ידי דרייבר אחד של GaN FET בתדר גבוה בסידור חצי גשר.
TI מספקת את ה-TIDA-00909, עיצוב ייחוס עבור כונני מנועים בתדר גבוה המשתמש במהפך תלת פאזי עם שלושה LMG5200s, כדי להקל על התכנון עם ההתקן. להערכת ביצועים פשוטה, ה-TIDA-00909 מגיע עם ממשק מתאים לחיבור לערכת פיתוח C2000 MCU LaunchPad.

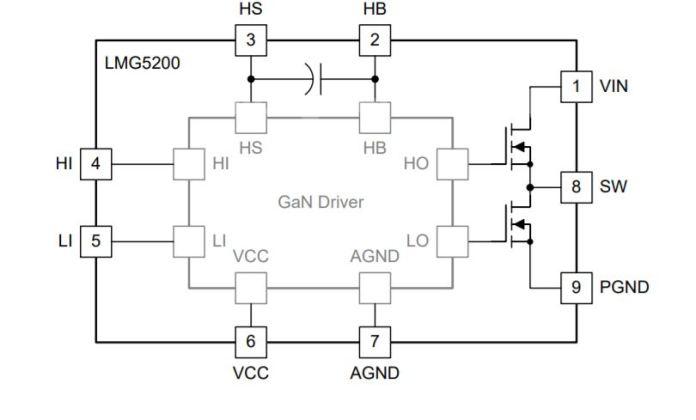
תרשים בלוקים LMG5200 (מקור: Texas Instruments Inc.)


לוח חשמל EPC9146. לחץ לתמונה גדולה יותר. (מקור: EPC)
דוגמה נוספת היא של EPC EPC9146 לוח חשמל, המשלב את ה-ePower Stage המונוליטי EPC2152 עם מנהל התקן שער משולב באמצעות טכנולוגיית GaN IC הקניינית של EPC, ומספק מתח התקן מקסימלי של 80V וזרם מוצא מקסימלי של 15A. עם תדר PWM של עד 3 מגה-הרץ, הוא יכול לפעול בעומס מלא. ה-EPC9146 מציע תכונות ליישומי כונן כוח, כגון שלב כוח מונוליטי עם דרייבר משולב של שער, מסילות כוח עזר מוסדרות עבור אספקת משק בית, חישת מתח וטמפרטורה, חישת זרם מדויקת ופונקציות הגנה.
ניתן לשייך את ה-EPC9146 עם לוחות התאמה מסדרת EPC9147 כדי לאפשר למשתמש לשלוט בלוח החשמל ישירות דרך לוח MCU מיינסטרים, תוך מינוף משאבים קיימים למטרות פיתוח מהירות.
המורכבות של רובוט מחייבת את הנהג הנכון לבצע את תפקידו כראוי הקשור ליישום התעשייתי. מוליכים למחצה WBG משמשים בבקרת מנוע מכיוון שהם מאפשרים מיתוג מהיר יותר, הכרחי עבור מנועים הפועלים בתדרים בסיסיים גבוהים. במקום ליצור מערכת הנעה מסובכת, המהנדסים מעדיפים להתמקד במה שהופך את עיצוב הגאדג'טים שלהם למיוחד.
אודות המרת הספק יעילה (EPC) מערכות חשמל מונוליטיות שילובי חשמל מכשירי טקסס