Elektromotoren zijn apparaten die elektrische energie omzetten in mechanische energie, die kan worden gebruikt om gelede systemen te verplaatsen. De elektromotor moet in staat zijn om een aanzienlijk koppel te produceren bij lage snelheden en extreem efficiënt zijn over het belastingsbereik. Het vereist ook een eenvoudig besturings- en aandrijfmechanisme. Hoewel ze complexere besturing vereisen, vinden borstelloze DC-motoren (BLDC's) hun weg in robottoepassingen vanwege hun betere prestaties.
BLDC-motoren winnen over de hele linie aan populariteit dankzij hun lagere productiekosten. Met name de komst van consumentendrones en e-bikes heeft geleid tot een wijdverbreide acceptatie van BLDC-motoren, die voorheen alleen werden gebruikt in hoogwaardige industriële toepassingen.
Ingenieurs die deze BLDC-motortoepassingen ontwikkelen, zijn de afgelopen twee decennia net zo veranderd als de motorbesturing. De ingenieur van vandaag concentreert zich liever op wat hun apparaatontwerp uniek maakt in plaats van een complex voortstuwingssysteem te bouwen. Ingenieurs richten zich op strakkere ontwerpen met een minimale vormfactor, intuïtieve gebruikersinterfaces, realtime mogelijkheden, functionele veiligheid en het delen van gegevens in de cloud.
Het controleprobleem
Een belangrijk onderdeel van een robotsysteem is de motorcontroller. Er kunnen verschillende besturingsstrategieën worden gebruikt om een robotmanipulator of robotarm te bedienen. De technologie gebruikt en hoe het wordt geïmplementeerd, kan een aanzienlijke impact hebben op de prestaties van de manipulator en, als gevolg daarvan, op het scala aan haalbare toepassingen. Het mechanische ontwerp van de manipulator en het bedieningssysteem heeft daarentegen invloed op het type besturingsschema dat kan worden gebruikt.
Terwijl de taak van de robot typisch wordt vermeld in een operationele ruimte, worden de besturingsacties geïmplementeerd in de gewrichtsruimte in termen van de beweging van de verschillende delen van de robot. Dientengevolge is het redelijk om twee soorten controleschema's te onderzoeken: een voor gezamenlijke ruimte en een andere voor operationele ruimte. De controllerstructuur is in beide schema's een gesloten regelsysteem om de voordelen van feedback te benutten in termen van veerkracht tegen potentieel onbekende effecten op het model en minimalisering van storingseffecten zoals ruis.
Het probleem van de controle van de gezamenlijke ruimte houdt in dat de inverse kinematica van de manipulator wordt opgelost om bewegingsvereisten om te zetten van de operationele naar de gezamenlijke ruimte. Het regelschema wordt vervolgens gemaakt zodat de beweging van de mechanische structuur de beoogde beweging kan volgen. Ter vergelijking: controle in de operationele ruimte vereist een veel hoger niveau van computationele complexiteit waarin de kinematische inversie is opgenomen in het gesloten-lussysteem.
Het gebruikte besturingssysteem, evenals verschillende benaderingen en circuits op basis van de motor- en toepassingsbehoeften, zijn vereist voor het regelen van de snelheid en richting van de motoren. Het doel van een motorcontroller is om een elektromotor handmatig of automatisch te kunnen bedienen (start-stop, inversie, snelheid, torsie en bescherming tegen spanning overbelasting).
Traditionele motoren hebben een aantal voordelen die BLDC-motoren niet hebben. BLDC- en AC-aangedreven synchrone permanentmagneetmotoren (PMSM's) kunnen de vereiste precisie en hoge efficiëntie bieden in een compacte vormfactor. Bovendien zijn DC-motoren van het borsteltype en AC-inductiemotoren eenvoudig aan te sluiten en te bedienen, in tegenstelling tot BLDC's en PMSM's, die complexer zijn.


De DRV8301-69M-KIT-motorset bevat een Drie fase chauffeur met geïntegreerde bok regelaar en stroomshuntversterkers. Klik voor een grotere afbeelding. (Bron: Texas Instruments Inc.)
BLDC's gebruiken bijvoorbeeld technieken zoals sensorloze vectorcontrole (ook wel field-oriented control of FOC genoemd) die een goede efficiëntie bieden en het voordeel hebben dat ze sensor hardware, waardoor de kosten worden verlaagd en de betrouwbaarheid wordt verbeterd. Het probleem voor ontwerpers is dat sensorloze vectorcontrole ingewikkeld is om te implementeren, dus het gebruik ervan kan de ontwikkelingstijd verlengen, de kosten verhogen en mogelijk de time-to-market-prognoses overschrijden.
Om dit dilemma op te lossen, kunnen ontwerpers zich wenden tot ontwikkelplatforms zoals de DRV8301-69M-KIT motorkit van Texas Instruments Inc. met een DRV8301 driefasige gate-driver geïntegreerd met een buck-regelaar en stroomshuntversterkers en een InstaSPIN-FOC en InstaSPIN-MOTION-enabled Piccolo TMS320F28069M microcontroller (MCU) bord.
Ondanks de complexiteit van het ontwerp, komen de belangrijkste voordelen van een BLDC voort uit de constructiekenmerken. Ze bieden doorgaans een 15% tot 20% hogere efficiëntie dan geborstelde oplossingen, hebben minder onderhoud nodig vanwege hun borstelloze ontwerp en leveren een vlakke koppelcurve bij alle nominale snelheden. In veel toepassingen zijn geborstelde motoren vervangen door BLDC's als gevolg van recente ontwikkelingen in Halfgeleider technologie, verbeteringen in permanente magneten en een grotere vraag naar hogere efficiëntie.
DC-stuurprogramma's
BLDC's gebruiken elektronische commutatie, wat een betere stroomschakeling mogelijk maakt. Het leidt tot een groter koppel, nauwkeurige snelheidsregeling over een breed bereik en verbeterde motorprestaties. Een halve brug of halve H-brug circuit is te vinden in de meeste BLDC-motorcontrollers. Dit circuitontwerp heeft, in tegenstelling tot een H-brug, slechts twee schakelaars: een high-side en een low-side Transistor.
Er zijn eenfasige, tweefasige en driefasige BLDC-motoren beschikbaar. Het driefasige type is het populairst. Het aantal wikkelingen van de motorstator komt overeen met het aantal fasen, maar de rotorpolen kunnen een willekeurig aantal paren zijn, afhankelijk van de toepassing.
Een fundamenteel onderdeel van BLDC-besturing is de bestuurder. Het is een vermogensversterker met spanningsuitgang die de hoge-stroom hoge- en lage-zijde van het halfbrugcircuit aanstuurt IGBT poorten.
Een voorbeeld is de Power Integrations 400-W BRD1167 en BRD1267 BrugSwitch IC's die een continue RMS-fasestroom van 1.33 A en een FREDFET DC-uitgangsstroom van 11.5 A leveren. Ze zijn zelfvoorzienend en worden geleverd in het InSOP-24C-opbouwpakket, net als de rest van de BridgeSwitch-familie. Deze apparaten ondersteunen alle belangrijke MCU- en motorbesturingsmethoden en kunnen enkelfasige of meerfasige synchrone of asynchrone hoogspanningsmotoren aansturen. Overstroom-, over-/onderspannings- en oververhittingsbeveiliging zijn inbegrepen in alle BridgeSwitch IC's, wat de IEC 60335- en IEC 60730-certificering vereenvoudigt.
Een ander voorbeeld is dat van Monolithic Power Systems Inc MP6612D omkeerbare motor driver die een H-brug gebruikt. Het kan een gelijkstroommotor, een stappenmotorwikkeling en andere belastingen aansturen. Vier N-kanaals voeding mosfets en een interne laadpomp creëren de gate-driverspanningen in de H-brug. De DIR- en ENBL-pinnen worden gebruikt om de uitgangen te besturen.

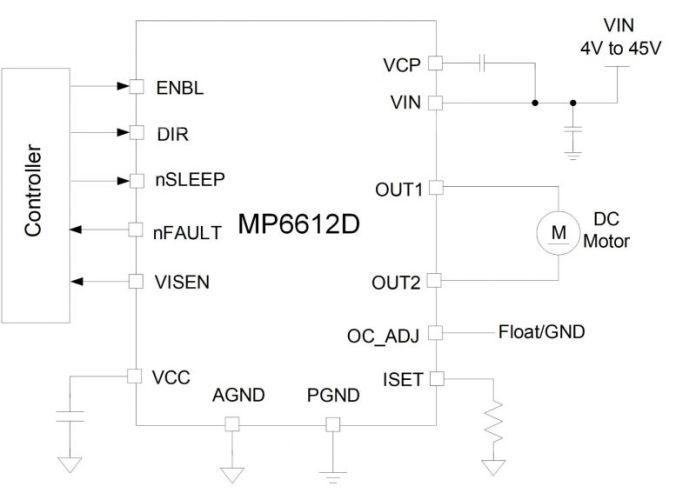
MP6612D blokschema (Bron: Monolithic Power Systems Inc.)
Halfgeleiders met brede bandgap
Voor opkomende elektronische toepassingen zijn elektromotorontwerpen vereist die hogere prestaties halen uit steeds compactere platforms. Motoraansturingscircuits die vertrouwen op klassieke silicium MOSFET's en IGBT's hebben moeite om aan de nieuwe criteria te voldoen. Het wordt voor ontwerpers steeds moeilijker om vermogensverliezen onder controle te houden, aangezien siliciumtechnologie de theoretische limieten voor vermogensdichtheid, doorslagspanning en schakelfrequentie nadert. De belangrijkste gevolgen van deze beperkingen zijn verminderde efficiëntie en extra prestatieproblemen bij hoge bedrijfstemperaturen en schakelsnelheden.
Wide-bandgap (WBG) halfgeleiders zoals siliciumcarbide (SiC) en galliumnitride (GaN) apparaten worden gebruikt in motorbesturing omdat ze sneller schakelen mogelijk zijn voor motoren die op hoge fundamentele frequenties werken en een goed gefilterde rimpel vereisen. De hoge schakelsnelheden die worden bereikt door WBG-apparaten, terwijl ze een hogere conversie-efficiëntie bieden, genereren echter ook zeer snelle spanningsvariaties die resulteren in hoge spanningsveranderingssnelheden (dV/dt) die de isolatie van de motorwikkelingen kunnen belasten. Vermogenselektronische toepassingen hebben daarom twee hoofddoelen: het beheersen van thermische problemen en het verkleinen van de systeemomvang.
Fabrikanten zoals Texas Instruments hebben GaN-geïntegreerde stroomapparaten ontwikkeld die helpen om de beste prestaties uit WBG-apparaten te halen. Bijvoorbeeld de LMG5200 biedt een 80-V GaN halfbrug-vermogenstrap met GaN-FET's in de verbeteringsmodus. Het apparaat bestaat uit twee GaN FET's die worden aangedreven door één hoogfrequente GaN FET-driver in een halfbrug-opstelling.
TI levert de TIDA-00909, een referentieontwerp voor hoogfrequente motoraandrijvingen die gebruik maken van een driefasige omvormer met drie LMG5200's, om het ontwerpen met het apparaat gemakkelijker te maken. Voor een eenvoudige prestatiebeoordeling wordt de TIDA-00909 geleverd met een geschikte interface voor aansluiting op een C2000 MCU LaunchPad-ontwikkelkit.

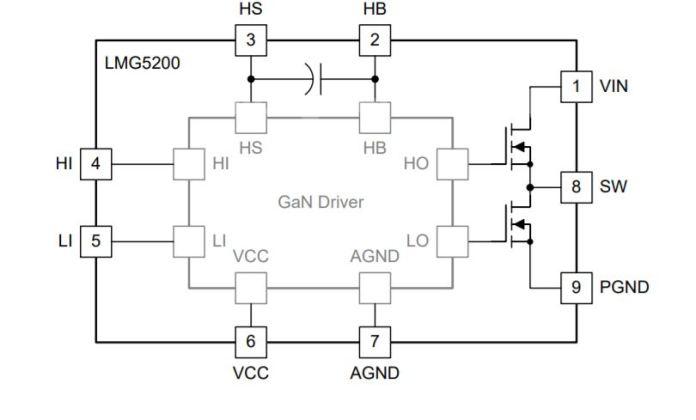
LMG5200 blokschema (Bron: Texas Instruments Inc.)


EPC9146 voedingskaart. Klik voor een grotere afbeelding. (Bron: EPC)
Een ander voorbeeld zijn EPC's EPC9146 voedingskaart, die de EPC2152 monolithische ePower Stage bevat met een geïntegreerde gate-driver met behulp van EPC's eigen GaN IC-technologie, en een maximale apparaatspanning van 80 V en een maximale uitgangsstroom van 15 A levert. Met een PWM-frequentie tot 3 MHz kan hij op volle belasting draaien. De EPC9146 biedt functies voor power-drive-toepassingen, zoals een monolithische vermogenstrap met een geïntegreerde gate-driver, gereguleerde hulpstroomrails voor huishoudelijke voedingen, spannings- en temperatuurdetectie, nauwkeurige stroomdetectie en beschermende functies.
De EPC9146 kan worden gekoppeld aan EPC9147-serie paringsborden, zodat de gebruiker het voedingsbord rechtstreeks kan bedienen via een mainstream MCU-bord, waarbij gebruik wordt gemaakt van bestaande bronnen voor snelle ontwikkelingsdoeleinden.
De complexiteit van een robot vereist de juiste bestuurder om zijn functie gerelateerd aan de industriële toepassing goed uit te voeren. WBG-halfgeleiders worden gebruikt in motorbesturing omdat ze sneller schakelen mogelijk maken, wat nodig is voor motoren die op hoge fundamentele frequenties werken. In plaats van een ingewikkeld voortstuwingssysteem te maken, concentreren ingenieurs zich liever op wat hun gadgetontwerp onderscheidend maakt.
over Efficient Power Conversion (EPC)Monolithic Power SystemsPower IntegrationsTexas Instruments