Электродвигатели - это устройства, преобразующие электрическую энергию в механическую, которая может использоваться для перемещения шарнирных систем. Электродвигатель должен обеспечивать значительный крутящий момент на низких скоростях и быть чрезвычайно эффективным во всем диапазоне нагрузок. Также требуется простой механизм управления и привода. Несмотря на то, что они требуют более сложного управления, бесщеточные двигатели постоянного тока (BLDC) находят применение в роботизированных приложениях из-за их лучшей производительности.
Двигатели BLDC становятся все популярнее благодаря более низким производственным затратам. Появление потребительских дронов и электронных велосипедов, в частности, привело к широкому распространению двигателей BLDC, которые ранее использовались только в высокотехнологичных промышленных приложениях.
Инженеры, которые разрабатывают эти приложения для двигателей BLDC, изменились за последние два десятилетия, так же как и управление двигателями. Сегодняшний инженер предпочитает сконцентрироваться на том, что делает конструкцию своего устройства уникальной, а не на создании сложной двигательной установки. Инженеры делают упор на изящный дизайн с минимальным форм-фактором, интуитивно понятным пользовательским интерфейсом, возможностями реального времени, функциональной безопасностью и совместным использованием данных в облаке.
Проблема управления
Важной частью роботизированной системы является контроллер двигателя. Для управления роботом-манипулятором или роботизированной рукой можно использовать несколько стратегий управления. technology Использование и способ его реализации могут оказать значительное влияние на производительность манипулятора и, как следствие, на диапазон жизнеспособных приложений. С другой стороны, механическая конструкция манипулятора и системы привода влияет на тип схемы управления, которая может использоваться.
В то время как работа робота обычно определяется в рабочем пространстве, управляющие действия реализуются в совместном пространстве с точки зрения движения различных частей робота. В результате целесообразно рассмотреть два типа схем управления: одну для совместного пространства, а другую - для рабочего пространства. Структура контроллера представляет собой систему управления с обратной связью в обеих схемах для использования преимуществ обратной связи с точки зрения устойчивости к потенциальным неизвестным воздействиям на модель и минимизации возмущающих эффектов, таких как шум.
Проблема управления пространством суставов влечет за собой решение обратной кинематики манипулятора для преобразования требований к движению из рабочего пространства в пространство сустава. Затем создается схема управления, чтобы движение механической конструкции могло следовать намеченному движению. Для сравнения, управление в рабочем пространстве требует гораздо более высокого уровня вычислительной сложности, при которой кинематическая инверсия включена в замкнутую систему.
Используемая операционная система, а также различные подходы и схемы, основанные на потребностях двигателя и приложения, необходимы для управления скоростью и направлением двигателей. Задача контроллера мотора - иметь возможность управлять электродвигателем вручную или автоматически (старт-стоп, инверсия, скорость, скручивание и защита от напряжение перегрузки).
У традиционных двигателей есть ряд преимуществ, которых нет у двигателей BLDC. Синхронные двигатели с постоянными магнитами (PMSM) с приводом от BLDC и переменным током могут обеспечить требуемую точность и высокую эффективность в компактном форм-факторе. Кроме того, щеточные электродвигатели постоянного тока и асинхронные электродвигатели переменного тока просты в подключении и эксплуатации, в отличие от более сложных BLDC и PMSM.


В комплект двигателя DRV8301-69M-KIT входит Трехфазный драйвер со встроенным баксом регулятор и усилители с токовым шунтом. Нажмите, чтобы увеличить изображение. (Источник: Texas Instruments Inc.)
Например, в BLDC используются такие методы, как бессенсорное векторное управление (также называемое полевым управлением или FOC), которые обеспечивают высокую эффективность и преимущество исключения датчик аппаратное обеспечение, тем самым снижая стоимость и повышая надежность. Проблема для проектировщиков состоит в том, что бессенсорное векторное управление сложно реализовать, поэтому его использование может увеличить время разработки, увеличить стоимость и, возможно, превысить прогнозируемое время выхода на рынок.
Чтобы решить эту дилемму, дизайнеры могут обратиться к платформам разработки, таким как ДРВ8301-69М-КОМПЛЕКТ комплект двигателя от Texas Instruments Inc., который включает трехфазный драйвер затвора DRV8301, интегрированный с понижающим стабилизатором и токовыми шунтирующими усилителями, и плату микроконтроллера (MCU) Piccolo TMS320F28069M с поддержкой InstaSPIN-FOC и InstaSPIN-MOTION.
Несмотря на сложность конструкции, основные преимущества BLDC связаны с его конструктивными особенностями. Как правило, они предлагают на 15-20% более высокий КПД, чем щеточные решения, требуют меньше обслуживания благодаря своей бесщеточной конструкции и обеспечивают ровную кривую крутящего момента на всех номинальных скоростях. Во многих приложениях щеточные двигатели были заменены на BLDC из-за недавних достижений в Полупроводниковое технологии, усовершенствования постоянных магнитов и повышенный спрос на более высокую эффективность.
Драйверы постоянного тока
BLDC используют электронную коммутацию, которая позволяет лучше переключать ток. Это приводит к увеличению крутящего момента, точному контролю скорости в широком диапазоне и улучшенным характеристикам двигателя. Полумост или полумост схема встречается в большинстве контроллеров двигателей BLDC. Эта схема, в отличие от H-моста, имеет только два переключателя: один верхний и один нижний. Транзистор.
Доступны однофазные, двухфазные и трехфазные двигатели BLDC. Трехфазный тип наиболее популярен. Количество обмоток статора двигателя коррелирует с количеством фаз, но полюсы ротора могут быть любым количеством пар, в зависимости от применения.
Фундаментальным компонентом управления BLDC является драйвер. Это усилитель мощности с выходным напряжением, который управляет сильноточными верхними и нижними плечами полумостовой схемы. IGBT ворота.
Одним из примеров является Power Integrations 400-W BRD1167 и BRD1267. МостSwitch Микросхемы, обеспечивающие непрерывный среднеквадратичный фазный ток 1.33 А и выходной постоянный ток FREDFET 11.5 А. Они имеют автономное питание и поставляются в корпусе для поверхностного монтажа InSOP-24C, как и остальная часть семейства BridgeSwitch. Эти устройства поддерживают все основные микроконтроллеры и методы управления двигателями и могут работать с однофазными или многофазными синхронными или асинхронными двигателями высокого напряжения. Защита от перегрузки по току, повышенного / пониженного напряжения и перегрева включена во все ИС BridgeSwitch, что упрощает сертификацию IEC 60335 и IEC 60730.
Другой пример - компания Monolithic Power Systems Inc. МП6612Д реверсивный драйвер двигателя, использующий Н-мост. Он может управлять двигателем постоянного тока, обмоткой шагового двигателя и другими нагрузками. Четыре N-канальных мощности МОП-транзисторы и внутренняя накачка заряда создают напряжения драйвера затвора в H-мосте. Контакты DIR и ENBL используются для управления выходами.

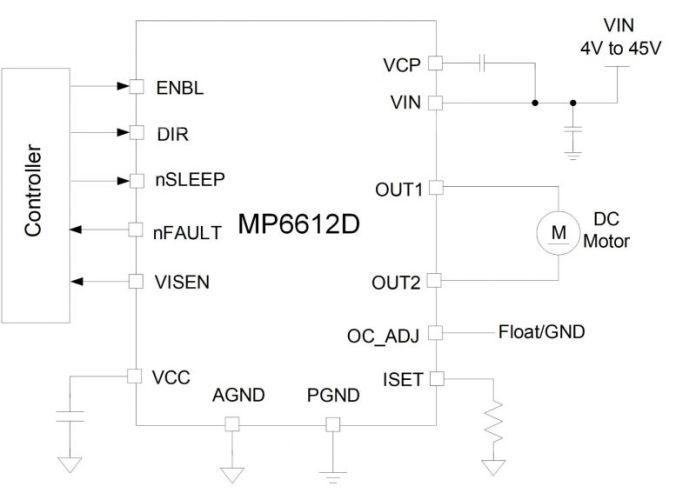
Блок-схема MP6612D (Источник: Monolithic Power Systems Inc.)
Полупроводники с широкой запрещенной зоной
Для новых электронных приложений требуются конструкции электродвигателей, обеспечивающие более высокую производительность все более компактных платформ. Схемы драйверов двигателей, основанные на классических кремниевых MOSFET и IGBT, изо всех сил пытаются соответствовать новым критериям. Разработчикам становится все труднее контролировать потери мощности, поскольку кремниевая технология приближается к теоретическим пределам для плотности мощности, напряжения пробоя и частоты коммутации. Основными последствиями этих ограничений являются снижение эффективности и дополнительные проблемы с производительностью при высоких рабочих температурах и скоростях переключения.
Полупроводники с широкой запрещенной зоной (WBG), такие как устройства из карбида кремния (SiC) и нитрида галлия (GaN), используются в управлении двигателем, поскольку они обеспечивают более быстрое переключение, которое может потребоваться для двигателей, работающих на высоких основных частотах и требующих хорошо отфильтрованной пульсации. Однако высокие скорости переключения, достигаемые устройствами WBG, предлагая более высокую эффективность преобразования, также вызывают очень быстрые изменения напряжения, которые приводят к высоким скоростям изменения напряжения (dV / dt), что может вызвать нагрузку на изоляцию обмоток двигателя. Таким образом, силовые электронные приложения преследуют две основные цели: управление тепловыми проблемами и уменьшение размера системы.
Такие производители, как Texas Instruments, разработали интегрированные устройства питания с GaN, которые помогают добиться максимальной производительности от устройств WBG. Например, LMG5200 обеспечивает силовой каскад GaN-полумоста на 80 В с полевыми GaN-транзисторами с улучшенным режимом работы. Устройство состоит из двух полевых GaN транзисторов, питаемых от одного высокочастотного драйвера GaN FET в полумостовой схеме.
TI поставляет TIDA-00909, эталонную конструкцию для высокочастотных моторных приводов, использующих трехфазный инвертор с тремя LMG5200, чтобы упростить проектирование с помощью устройства. Для простой оценки производительности TIDA-00909 поставляется с подходящим интерфейсом для подключения к комплекту разработки C2000 MCU LaunchPad.

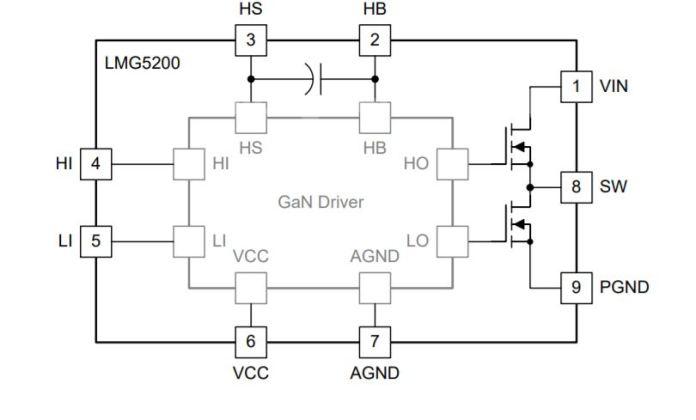
Блок-схема LMG5200 (Источник: Texas Instruments Inc.)


Плата питания EPC9146. Щелкните, чтобы увеличить изображение. (Источник: EPC)
Другой пример - EPC EPC9146 Плата питания, которая включает монолитный каскад ePower Stage EPC2152 со встроенным драйвером затвора с использованием запатентованной технологии EPC GaN IC и обеспечивает максимальное напряжение устройства 80 В и максимальный выходной ток 15 А. Благодаря частоте ШИМ до 3 МГц он может работать при полной нагрузке. EPC9146 предлагает функции для приложений с силовым приводом, такие как монолитный силовой каскад со встроенным драйвером затвора, регулируемые вспомогательные шины питания для бытовых источников питания, измерение напряжения и температуры, точное измерение тока и защитные функции.
EPC9146 может работать в паре с сопрягаемыми платами серии EPC9147, что позволяет пользователю управлять платой питания напрямую через стандартную плату MCU, используя существующие ресурсы для быстрой разработки.
Сложность робота требует, чтобы правильный водитель выполнял свои функции должным образом, связанные с промышленным применением. Полупроводники WBG используются в управлении двигателями, поскольку они обеспечивают более быстрое переключение, что необходимо для двигателей, работающих на высоких основных частотах. Вместо того, чтобы создавать сложную двигательную установку, инженеры предпочитают сосредоточиться на том, что отличает дизайн их гаджетов.
об эффективном преобразовании мощности (EPC)Monolithic Power SystemsPower IntegrationsTexas Instruments