전기 모터는 전기 에너지를 관절 시스템을 움직이는 데 사용할 수 있는 기계적 에너지로 변환하는 장치입니다. 전기 모터는 저속에서 상당한 토크를 생성할 수 있어야 하고 부하 범위에서 매우 효율적이어야 합니다. 또한 간단한 제어 및 구동 메커니즘이 필요합니다. 더 복잡한 제어가 필요하지만 브러시리스 DC 모터(BLDC)는 더 나은 성능으로 인해 로봇 애플리케이션에서 홈을 찾고 있습니다.
BLDC 모터는 낮은 생산 비용 덕분에 전반적으로 인기를 얻고 있습니다. 특히 소비자용 드론과 전기자전거의 등장으로 이전에는 고급 산업용 애플리케이션에만 사용되었던 BLDC 모터가 널리 채택되었습니다.
이러한 BLDC 모터 애플리케이션을 개발하는 엔지니어는 모터 제어만큼이나 지난 XNUMX년 동안 변화했습니다. 오늘날의 엔지니어는 복잡한 추진 시스템을 구성하는 것보다 장치 설계를 독특하게 만드는 요소에 집중하는 것을 선호합니다. 엔지니어는 최소한의 폼 팩터, 직관적인 사용자 인터페이스, 실시간 기능, 기능적 안전성, 클라우드에서의 데이터 공유를 통해 보다 세련된 디자인에 집중하고 있습니다.
제어 문제
로봇 시스템의 중요한 부분은 모터 컨트롤러입니다. 로봇 매니퓰레이터 또는 로봇 팔을 작동하는 데 여러 가지 제어 전략을 사용할 수 있습니다. 그만큼 technology 활용 및 구현 방법은 조작기의 성능과 결과적으로 실행 가능한 응용 프로그램의 범위에 상당한 영향을 미칠 수 있습니다. 반면에 조작기 및 작동 시스템의 기계적 설계는 사용될 수 있는 제어 방식의 유형에 영향을 미칩니다.
로봇의 작업은 일반적으로 작업 공간에서 명시되지만 제어 동작은 로봇의 다양한 부분의 움직임 측면에서 관절 공간에서 구현됩니다. 결과적으로 두 가지 유형의 제어 방식을 검토하는 것이 합리적입니다. 하나는 공동 공간용이고 다른 하나는 작전 공간용입니다. 컨트롤러 구조는 모델에 대한 잠재적인 알려지지 않은 영향에 대한 탄력성과 노이즈와 같은 교란 효과의 최소화 측면에서 피드백의 이점을 활용하기 위해 두 방식 모두에서 폐쇄 루프 제어 시스템입니다.
조인트 공간 제어 문제는 작동 요구 사항을 조인트 공간으로 변환하기 위해 매니퓰레이터의 역운동학을 해결하는 것을 수반합니다. 그런 다음 기계 구조의 동작이 의도한 동작을 따를 수 있도록 제어 체계가 생성됩니다. 이에 비해 작동 공간의 제어는 운동학적 역전이 폐쇄 루프 시스템에 통합되는 훨씬 더 높은 수준의 계산 복잡성을 필요로 합니다.
모터의 속도와 방향을 제어하려면 사용 중인 운영 체제와 모터 및 애플리케이션 요구 사항에 따른 다양한 접근 방식 및 회로가 필요합니다. 모터 컨트롤러의 목표는 전기 모터를 수동 또는 자동으로 작동할 수 있도록 하는 것입니다(시작-정지, 반전, 속도, 비틀림 및 전압 과부하).
기존 모터에는 BLDC 모터에 없는 많은 이점이 있습니다. BLDC 및 AC 구동 영구 자석 동기 모터(PMSM)는 소형 폼 팩터에서 필요한 정밀도와 고효율을 제공할 수 있습니다. 또한 브러시 형 DC 모터와 AC 유도 모터는 연결 및 작동이 더 복잡한 BLDC 및 PMSM과 달리 쉽습니다.


DRV8301-69M-KIT 엔진 키트에는 다음이 포함됩니다. 세 단계 벅이 통합된 드라이버 조정기 및 전류 션트 증폭기. 더 큰 이미지를 보려면 클릭하세요. (출처: 텍사스 인스트루먼트(Texas Instruments Inc.))
예를 들어, BLDC는 우수한 효율성과 감지기 하드웨어를 사용하여 비용을 절감하고 안정성을 향상시킵니다. 설계자들의 문제는 센서리스 벡터 제어가 구현하기 복잡하기 때문에 이를 사용하면 개발 시간이 길어지고 비용이 추가되고 시장 출시 시간 예측을 초과할 수 있다는 점입니다.
이 딜레마를 해결하기 위해 디자이너는 다음과 같은 개발 플랫폼으로 전환할 수 있습니다. DRV8301-69M-키트 벅 레귤레이터 및 전류 션트 증폭기와 통합된 DRV8301 320상 게이트 드라이버, InstaSPIN-FOC 및 InstaSPIN-MOTION 지원 Piccolo TMS28069FXNUMXM 마이크로컨트롤러(MCU) 보드가 포함된 Texas Instruments Inc.의 엔진 키트.
설계 복잡성에도 불구하고 BLDC의 주요 이점은 구성 기능에서 비롯됩니다. 일반적으로 브러시 방식 솔루션보다 15%~20% 더 높은 효율성을 제공하고 브러시리스 설계로 인해 유지 관리가 덜 필요하며 모든 정격 속도에서 평평한 토크 곡선을 제공합니다. 많은 응용 분야에서 브러시 모터는 최근의 발전으로 인해 BLDC로 대체되었습니다. 반도체 기술, 영구 자석의 개선, 더 높은 효율에 대한 요구 증가.
DC 드라이버
BLDC는 더 나은 전류 스위칭을 허용하는 전자 정류를 사용합니다. 이는 더 큰 토크, 넓은 범위에 걸쳐 정확한 속도 제어 및 개선된 모터 성능으로 이어집니다. 하프 브리지 또는 하프 H 브리지 회로 대부분의 BLDC 모터 컨트롤러에서 볼 수 있습니다. 이 회로 설계는 H-브리지와 달리 하이 사이드와 로우 사이드의 두 개의 스위치만 있습니다. 트랜지스터.
단상, XNUMX상 및 XNUMX상 BLDC 모터를 사용할 수 있습니다. XNUMX상 유형이 가장 인기가 있습니다. 모터 고정자의 권선 수는 위상 수와 상관관계가 있지만 회전자 극은 애플리케이션에 따라 임의의 수의 쌍이 될 수 있습니다.
BLDC 제어의 기본 구성 요소는 드라이버입니다. 하프 브리지 회로의 고전류 하이사이드 및 로우사이드를 구동하는 전압 출력 전력 증폭기입니다. IGBT 게이트.
한 가지 예는 Power Integrations 400-W BRD1167 및 BRD1267입니다. 브리지스위치 1.33A의 연속 RMS 위상 전류와 11.5A의 FREDFET DC 출력 전류를 제공하는 IC. 나머지 BridgeSwitch 제품군과 마찬가지로 자체 전원 공급이 가능하며 InSOP-24C 표면 실장 패키지로 제공됩니다. 이 장치는 모든 주요 MCU 및 모터 제어 방법을 지원하며 단상 또는 다상 고전압 동기 또는 비동기 모터를 작동할 수 있습니다. 과전류, 과전압/저전압 및 과열 보호 기능이 모든 BridgeSwitch IC에 포함되어 IEC 60335 및 IEC 60730 인증을 간소화합니다.
또 다른 예는 Monolithic Power Systems Inc. MP6612D H 브리지를 사용하는 가역 모터 드라이버. DC 모터, 스테퍼 모터 권선 및 기타 부하를 작동할 수 있습니다. XNUMX개의 N 채널 전원 MOSFET 내부 차지 펌프는 H-브리지에서 게이트 드라이버 전압을 생성합니다. DIR 및 ENBL 핀은 출력을 제어하는 데 사용됩니다.

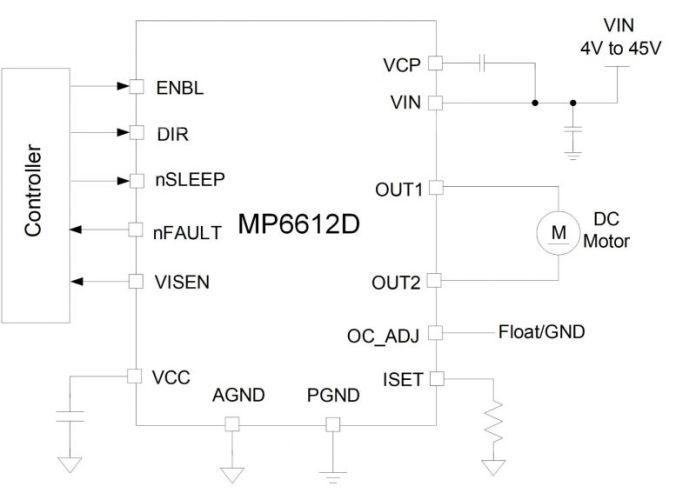
MP6612D 블록 다이어그램(출처: Monolithic Power Systems Inc.)
와이드 밴드갭 반도체
점점 더 소형화되는 플랫폼에서 더 높은 성능을 추출하는 전기 모터 설계는 신흥 전자 애플리케이션에 필요합니다. 기존 실리콘 MOSFET 및 IGBT에 의존하는 모터 드라이버 회로는 새로운 기준을 충족하기 위해 고군분투하고 있습니다. 실리콘 기술이 전력 밀도, 항복 전압 및 스위칭 주파수에 대한 이론적 한계에 접근함에 따라 설계자가 전력 손실을 제어하기가 점점 더 어려워지고 있습니다. 이러한 제약의 주요 결과는 높은 작동 온도 및 스위칭 속도에서 효율성 감소 및 추가 성능 문제입니다.
탄화규소(SiC) 및 질화갈륨(GaN) 장치와 같은 WBG(광대역갭) 반도체는 높은 기본 주파수에서 작동하고 잘 필터링된 리플이 필요한 모터에 필요할 수 있는 더 빠른 스위칭을 제공하기 때문에 모터 제어에 사용됩니다. 그러나 WBG 장치에 의해 달성되는 높은 스위칭 속도는 더 높은 변환 효율을 제공하는 동시에 모터 권선의 절연에 스트레스를 줄 수 있는 높은 전압 변화율(dV/dt)을 초래하는 매우 빠른 전압 변동을 생성합니다. 따라서 전력 전자 애플리케이션에는 열 문제 관리와 시스템 크기 감소라는 두 가지 주요 목표가 있습니다.
Texas Instruments와 같은 제조업체는 WBG 장치에서 최고의 성능을 얻는 데 도움이 되는 GaN 통합 전원 장치를 개발했습니다. 예를 들어, LMG5200 향상 모드 GaN FET와 함께 80V GaN 하프 브리지 전력단을 제공합니다. 이 장치는 하프 브리지 배열에서 하나의 고주파수 GaN FET 드라이버로 구동되는 XNUMX개의 GaN FET로 구성됩니다.
TI는 00909개의 LMG5200이 포함된 00909상 인버터를 사용하는 고주파 모터 드라이브용 참조 설계인 TIDA-2000를 공급하여 장치를 보다 쉽게 설계할 수 있도록 합니다. 간단한 성능 평가를 위해 TIDA-XNUMX는 CXNUMX MCU LaunchPad 개발 키트에 연결하는 데 적합한 인터페이스와 함께 제공됩니다.

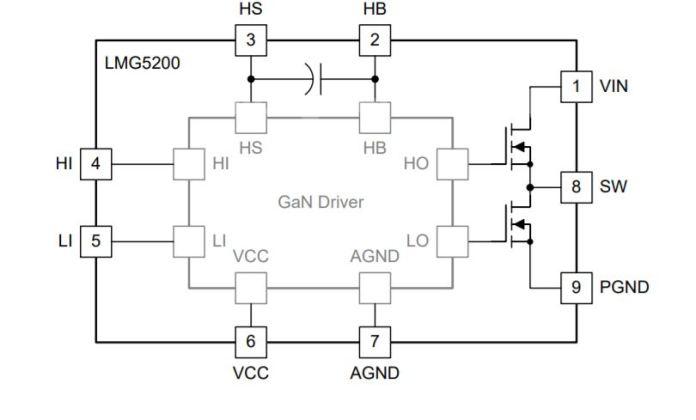
LMG5200 블록 다이어그램(출처: Texas Instruments Inc.)


EPC9146 전원 보드. 더 큰 이미지를 보려면 클릭하세요. (출처: EPC)
또 다른 예는 EPC의 EPC9146 EPC의 독점 GaN IC 기술을 사용하는 통합 게이트 드라이버와 함께 EPC2152 모놀리식 ePower Stage를 통합하고 80V 최대 장치 전압과 15A 최대 출력 전류를 제공하는 전원 보드입니다. 최대 3MHz의 PWM 주파수로 최대 부하에서 실행할 수 있습니다. EPC9146은 통합 게이트 드라이버가 있는 모놀리식 전력 스테이지, 하우스키핑 공급을 위한 조정된 보조 전원 레일, 전압 및 온도 감지, 정밀한 전류 감지, 보호 기능과 같은 전력 구동 애플리케이션을 위한 기능을 제공합니다.
EPC9146은 EPC9147 시리즈 결합 보드와 쌍을 이루어 사용자가 메인스트림 MCU 보드를 통해 직접 전원 보드를 제어할 수 있도록 하여 빠른 개발 목적으로 기존 리소스를 활용합니다.
로봇의 복잡성은 산업용 애플리케이션과 관련된 적절한 기능을 수행하기 위해 올바른 운전자를 필요로 합니다. WBG 반도체는 높은 기본 주파수에서 작동하는 모터에 필요한 더 빠른 스위칭을 허용하기 때문에 모터 제어에 사용됩니다. 엔지니어는 복잡한 추진 시스템을 만드는 대신 가제트 디자인을 독특하게 만드는 요소에 집중하는 것을 선호합니다.
EPC(Efficient Power Conversion)에 대해 모놀리식 전력 시스템Power IntegrationsTexas Instruments