Động cơ điện là thiết bị biến đổi năng lượng điện thành năng lượng cơ học, có thể được sử dụng để di chuyển các hệ thống khớp nối. Động cơ điện phải có khả năng tạo ra mô-men xoắn đáng kể ở tốc độ thấp và cực kỳ hiệu quả trong phạm vi tải. Nó cũng yêu cầu một cơ chế điều khiển và dẫn động đơn giản. Mặc dù chúng yêu cầu điều khiển phức tạp hơn, nhưng động cơ DC không chổi than (BLDC) đang tìm thấy ngôi nhà trong các ứng dụng robot do hiệu suất tốt hơn của chúng.
Động cơ BLDC đang trở nên phổ biến trên diện rộng nhờ chi phí sản xuất thấp hơn. Đặc biệt, sự xuất hiện của máy bay không người lái và xe đạp điện đã dẫn đến việc áp dụng rộng rãi động cơ BLDC, vốn trước đây chỉ được sử dụng trong các ứng dụng công nghiệp cao cấp.
Các kỹ sư đang phát triển các ứng dụng động cơ BLDC này đã thay đổi trong hai thập kỷ qua, cũng giống như điều khiển động cơ. Kỹ sư ngày nay thích tập trung vào những gì làm cho thiết kế thiết bị của họ trở nên độc đáo hơn là xây dựng một hệ thống đẩy phức tạp. Các kỹ sư đang tập trung vào các thiết kế đẹp hơn với kiểu dáng tối thiểu, giao diện người dùng trực quan, khả năng thời gian thực, chức năng an toàn và chia sẻ dữ liệu trên đám mây.
Vấn đề kiểm soát
Một phần quan trọng của hệ thống robot là bộ điều khiển động cơ. Một số chiến lược điều khiển có thể được sử dụng để vận hành bộ điều khiển robot hoặc cánh tay robot. Các công nghệ được sử dụng và cách nó được triển khai có thể có tác động đáng kể đến hiệu suất của bộ điều khiển và do đó, đến phạm vi ứng dụng khả thi. Mặt khác, thiết kế cơ khí của bộ điều khiển và hệ thống dẫn động sẽ ảnh hưởng đến loại sơ đồ điều khiển có thể được sử dụng.
Trong khi công việc của robot thường được nêu trong một không gian hoạt động, các hành động điều khiển được thực hiện trong không gian chung về chuyển động của các bộ phận khác nhau của robot. Do đó, hợp lý để xem xét hai loại sơ đồ điều khiển: một cho không gian chung và một cho không gian hoạt động. Cấu trúc bộ điều khiển là một hệ thống điều khiển vòng kín trong cả hai sơ đồ để tận dụng các lợi ích của phản hồi về khả năng phục hồi các tác động tiềm ẩn chưa biết trên mô hình và giảm thiểu các hiệu ứng nhiễu như tiếng ồn.
Vấn đề kiểm soát không gian chung đòi hỏi phải giải quyết chuyển động học nghịch đảo của người thao tác để chuyển đổi các yêu cầu chuyển động từ hoạt động sang không gian chung. Sơ đồ điều khiển sau đó được tạo ra để chuyển động của cơ cấu cơ khí có thể tuân theo chuyển động đã định. Trong khi đó, việc kiểm soát trong không gian hoạt động đòi hỏi mức độ phức tạp tính toán cao hơn nhiều, trong đó nghịch đảo động học được đưa vào hệ thống vòng kín.
Hệ điều hành đang được sử dụng, cũng như các phương pháp tiếp cận và mạch khác nhau dựa trên nhu cầu của động cơ và ứng dụng, được yêu cầu để điều khiển tốc độ và hướng của động cơ. Mục đích của bộ điều khiển động cơ là có thể vận hành động cơ điện bằng tay hoặc tự động (dừng khởi động, đảo ngược, tốc độ, lực xoắn và bảo vệ chống lại Vôn quá tải).
Động cơ truyền thống có một số lợi ích mà động cơ BLDC không có. BLDC và động cơ đồng bộ nam châm vĩnh cửu điều khiển bằng AC (PMSM) có thể cung cấp độ chính xác cần thiết và hiệu suất cao trong một hệ số hình thức nhỏ gọn. Ngoài ra, động cơ DC kiểu chổi than và động cơ cảm ứng AC dễ kết nối và vận hành, không giống như BLDC và PMSM, phức tạp hơn.


Bộ động cơ DRV8301-69M-KIT bao gồm một Ba giai đoạn trình điều khiển với một chiếc xô tích hợp điều chỉnh và các bộ khuếch đại dòng điện shunt. Click để xem ảnh rõ hơn. (Nguồn: Texas Instruments Inc.)
Ví dụ: BLDCs sử dụng các kỹ thuật như điều khiển vectơ không cảm biến (còn gọi là điều khiển hướng trường, hoặc FOC) mang lại hiệu quả tốt và lợi thế là loại bỏ cảm biến phần cứng, do đó giảm chi phí và nâng cao độ tin cậy. Vấn đề đối với các nhà thiết kế là điều khiển véc tơ không cảm biến rất phức tạp để thực hiện, vì vậy việc sử dụng nó có thể kéo dài thời gian phát triển, thêm chi phí và có thể vượt quá dự báo thời gian cho thị trường.
Để giải quyết tình trạng khó xử này, các nhà thiết kế có thể chuyển sang các nền tảng phát triển như DRV8301-69M-KIT bộ động cơ của Texas Instruments Inc. bao gồm trình điều khiển cổng ba pha DRV8301 được tích hợp với bộ điều chỉnh buck và bộ khuếch đại ngắt dòng và bo mạch vi điều khiển Piccolo TMS320F28069M hỗ trợ InstaSPIN-FOC và InstaSPIN-MOTION (MCU).
Bất chấp sự phức tạp của thiết kế, những lợi ích chính của BLDC phát sinh từ các tính năng xây dựng của nó. Chúng thường cung cấp hiệu suất cao hơn từ 15% đến 20% so với dung dịch có chổi than, ít cần bảo dưỡng hơn do thiết kế không chổi than và cung cấp đường cong mô-men xoắn phẳng ở tất cả các tốc độ định mức. Trong nhiều ứng dụng, động cơ có chổi than đã được thay thế bằng BLDC do những tiến bộ gần đây trong Semiconductor công nghệ, cải tiến trong nam châm vĩnh cửu và nhu cầu tăng lên để đạt hiệu quả cao hơn.
Trình điều khiển DC
BLDC sử dụng chuyển mạch điện tử, cho phép chuyển mạch dòng điện tốt hơn. Nó dẫn đến mô-men xoắn lớn hơn, kiểm soát tốc độ chính xác trên một phạm vi rộng và cải thiện hiệu suất động cơ. Nửa cầu hoặc nửa cầu H mạch được tìm thấy trong hầu hết các bộ điều khiển động cơ BLDC. Thiết kế mạch này, không giống như cầu H, chỉ có hai công tắc: một bên cao và một bên thấp Transistor.
Có sẵn động cơ BLDC một pha, hai pha và ba pha. Loại ba pha là phổ biến nhất. Số lượng cuộn dây của stato động cơ tương quan với số pha, nhưng các cực của rôto có thể là bất kỳ số cặp nào, tùy thuộc vào ứng dụng.
Một thành phần cơ bản của điều khiển BLDC là trình điều khiển. Nó là một bộ khuếch đại công suất đầu ra điện áp điều khiển phía cao và phía thấp hiện tại của mạch nửa cầu. IGBT cửa ra vào.
Một ví dụ là Tích hợp nguồn 400-W BRD1167 và BRD1267 CầuChuyển Mạch Các IC cung cấp dòng pha RMS liên tục là 1.33 A và dòng ra FREDFET DC là 11.5 A. Chúng tự cấp nguồn và đi kèm trong gói gắn kết bề mặt InSOP-24C, giống như phần còn lại của họ BridgeSwitch. Các thiết bị này hỗ trợ tất cả các phương pháp điều khiển động cơ và MCU chính và có thể vận hành động cơ đồng bộ hoặc không đồng bộ điện áp cao một pha hoặc nhiều pha. Bảo vệ quá dòng, quá áp / quá áp và quá nhiệt được bao gồm trong tất cả các IC BridgeSwitch, giúp đơn giản hóa chứng chỉ IEC 60335 và IEC 60730.
Một ví dụ khác là Công ty TNHH Hệ thống điện nguyên khối MP6612D trình điều khiển động cơ có thể đảo ngược sử dụng cầu H. Nó có thể vận hành động cơ DC, cuộn dây động cơ bước và các tải khác. Bốn nguồn kênh N mosfet và một máy bơm tích điện bên trong tạo ra điện áp của trình điều khiển cổng trong cầu H. Các chân DIR và ENBL được sử dụng để điều khiển các đầu ra.

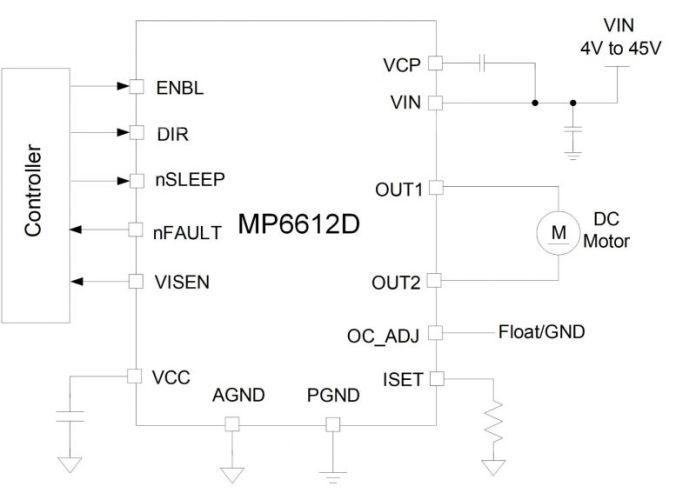
Sơ đồ khối MP6612D (Nguồn: Monopher Power Systems Inc.)
Chất bán dẫn dải rộng
Các thiết kế động cơ điện có hiệu suất cao hơn từ các nền tảng ngày càng nhỏ gọn hơn được yêu cầu cho các ứng dụng điện tử mới nổi. Các mạch điều khiển động cơ dựa trên MOSFET silicon cổ điển và IGBT đang gặp khó khăn để đáp ứng các tiêu chí mới. Việc kiểm soát tổn thất điện năng ngày càng trở nên khó khăn hơn đối với các nhà thiết kế khi công nghệ silicon tiếp cận các giới hạn lý thuyết về mật độ công suất, điện áp đánh thủng và tần số chuyển mạch. Hậu quả chính của những hạn chế này là giảm hiệu suất và các vấn đề về hiệu suất bổ sung ở nhiệt độ hoạt động cao và tốc độ chuyển mạch.
Các chất bán dẫn dải rộng (WBG) như thiết bị silic cacbua (SiC) và gali nitride (GaN) được sử dụng trong điều khiển động cơ vì chúng cung cấp khả năng chuyển mạch nhanh hơn có thể cần thiết cho động cơ hoạt động ở tần số cơ bản cao và yêu cầu gợn sóng được lọc tốt. Tuy nhiên, tốc độ chuyển mạch cao mà các thiết bị WBG đạt được, trong khi mang lại hiệu suất chuyển đổi cao hơn, cũng tạo ra sự biến đổi điện áp rất nhanh dẫn đến tốc độ thay đổi điện áp cao (dV / dt) có thể gây căng thẳng cách điện của cuộn dây động cơ. Do đó, các ứng dụng điện-điện tử có hai mục tiêu chính: quản lý các vấn đề nhiệt và giảm kích thước hệ thống.
Các nhà sản xuất như Texas Instruments đã phát triển các thiết bị nguồn tích hợp GaN giúp đạt được hiệu suất tốt nhất từ các thiết bị WBG. Ví dụ, LMG5200 cung cấp giai đoạn công suất nửa cầu 80-V GaN với các GaN FET ở chế độ nâng cao. Thiết bị bao gồm hai GaN FET được cung cấp bởi một trình điều khiển GaN FET tần số cao theo kiểu bố trí nửa cầu.
TI cung cấp TIDA-00909, một thiết kế tham chiếu cho truyền động động cơ tần số cao sử dụng bộ biến tần ba pha với ba LMG5200, để giúp việc thiết kế với thiết bị dễ dàng hơn. Để đánh giá hiệu suất đơn giản, TIDA-00909 đi kèm với giao diện phù hợp để kết nối với bộ phát triển C2000 MCU LaunchPad.

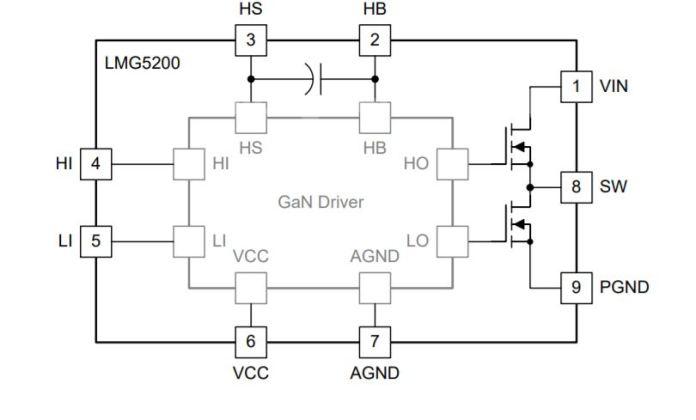
Sơ đồ khối LMG5200 (Nguồn: Texas Instruments Inc.)


Bảng nguồn EPC9146. Click để xem ảnh rõ hơn. (Nguồn: EPC)
Một ví dụ khác là EPC's EPC9146 bảng điện, kết hợp ePower Stage nguyên khối EPC2152 với trình điều khiển cổng tích hợp sử dụng công nghệ IC GaN độc quyền của EPC và cung cấp điện áp thiết bị tối đa 80-V và dòng điện đầu ra tối đa 15-A. Với tần số PWM lên đến 3 MHz, nó có thể chạy ở chế độ đầy tải. EPC9146 cung cấp các tính năng cho các ứng dụng truyền động điện, chẳng hạn như tầng nguồn nguyên khối với trình điều khiển cổng tích hợp, ray nguồn phụ được điều chỉnh cho nguồn cung cấp dịch vụ vệ sinh, cảm biến điện áp và nhiệt độ, cảm biến dòng điện chính xác và các chức năng bảo vệ.
EPC9146 có thể được ghép nối với các bảng giao phối loạt EPC9147 để cho phép người dùng điều khiển bảng nguồn trực tiếp thông qua bảng MCU chính, tận dụng các nguồn lực hiện có cho các mục đích phát triển nhanh chóng.
Sự phức tạp của robot đòi hỏi người điều khiển phù hợp để thực hiện đúng chức năng của nó liên quan đến ứng dụng công nghiệp. Chất bán dẫn WBG được sử dụng trong điều khiển động cơ vì chúng cho phép chuyển mạch nhanh hơn, điều này cần thiết cho động cơ hoạt động ở tần số cơ bản cao. Thay vì tạo ra một hệ thống động cơ phức tạp, các kỹ sư thích tập trung vào những gì làm cho thiết kế thiết bị của họ trở nên đặc biệt.
về Hệ thống điện nguyên khối chuyển đổi năng lượng hiệu quả (EPC)