
„Die heutigen starren Regelsysteme schränken die Anpassungsfähigkeit und Mobilität von flüssigkeitsgetriebenen Softrobotern erheblich ein“, sagt Professor Robert Wood von der Harvard School of Engineering and Applied Sciences (SEAS). „Wir haben weiche und leichte Ventile entwickelt, um weiche hydraulische Aktuatoren zu steuern, die Möglichkeiten für weiche On-Board-Steuerungen für zukünftige fluidische Softroboter eröffnen.“
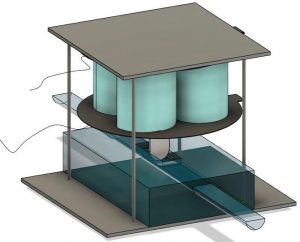
Die Ventile kombinieren einen elektrisch betriebenen dielektrischen Elastomer-Aktor ('DEA') mit einem weichen Flüssigkeitskanal (siehe Diagramm), um einen Aktuator herzustellen, der Hunderttausende von Zyklen laufen kann.
„Diese weichen Ventile haben eine schnelle Reaktionszeit und sind in der Lage, Fluiddruck und Durchflussmengen so zu steuern, dass sie den Anforderungen hydraulischer Aktuatoren entsprechen“, sagt Forschungskollege Siyi Xu. „Diese Ventile ermöglichen uns die Steuerung von hydraulischen Aktuatoren mit einem Innenvolumen von Hunderten von Mikrolitern bis zu Dutzenden von Millilitern.“
Eine 7 mm hohe Version des Stellantriebs wiegt 350 mg und arbeitet mit mindestens 500 Hz und steuert Flüssigkeiten mit bis zu 51 kPa und 40 ml/Minute innerhalb von 100 ms – im Vergleich zu früheren Weichventilen, die laut der Mannschaft. Antriebsspannungen über 3.5kV sind erforderlich.
Die Arbeit ist in „Ein dynamisches elektrisch angetriebenes weiches Ventil zur Steuerung weicher hydraulischer Aktuatoren“ beschrieben, das von der US National Academy of Science veröffentlicht wurde – für den vollständigen Zugriff ist eine Zahlung erforderlich.