
"Sistem peraturan yang ketat hari ini sangat membatasi kemampuan menyesuaikan dan mobiliti robot lembut yang didorong oleh bendalir," kata Profesor Robert Wood dari sekolah kejuruteraan dan sains gunaan (SEAS) Harvard. "Kami telah mengembangkan injap lembut dan ringan untuk mengawal penggerak hidraulik lembut yang membuka kemungkinan untuk kawalan on-board lembut untuk robot lembut cecair masa depan."
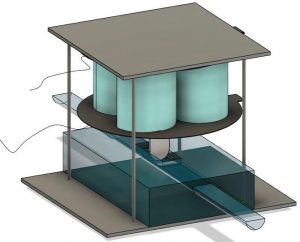
Injap menggabungkan penggerak elastomer dielektrik berkuasa elektrik ('DEA') dengan saluran cecair lembut (lihat rajah) untuk menghasilkan penggerak yang dapat berjalan selama beratus-ratus ribu kitaran.
"Injap lembut ini mempunyai masa tindak balas yang cepat dan dapat mengawal tekanan dan kadar aliran bendalir yang sesuai dengan keperluan penggerak hidraulik," kata rakan penyelidik Siyi Xu. "Injap ini memberi kita kawalan penggerak hidraulik dengan isipadu dalaman mulai dari ratusan mikroliter hingga puluhan mililiter."
Penggerak versi 7mm dengan berat 350mg dan berfungsi sekurang-kurangnya 500Hz, mengawal bendalir hingga 51kPa dan 40ml / minit dalam 100ms - berbanding dengan injap lembut sebelumnya yang berfungsi pada <3.5kPa dan <6 mL / minit, menurut pasukan. Voltan pemacu melebihi 1kV diperlukan.
Karya ini dijelaskan dalam 'Injap lembut elektrik yang dinamik untuk kawalan penggerak hidraulik lembut', yang diterbitkan oleh Akademi Sains Nasional AS - pembayaran diperlukan untuk akses penuh.