
「今日の厳格な規制システムは、流体駆動のソフトロボットの適応性と機動性を大幅に制限しています」とハーバード大学工学応用科学部(SEAS)のロバートウッド教授は述べています。 「私たちは、ソフト油圧アクチュエータを制御するためのソフトで軽量のバルブを開発しました。これにより、将来の流体ソフトロボットのソフトオンボード制御の可能性が広がります。」
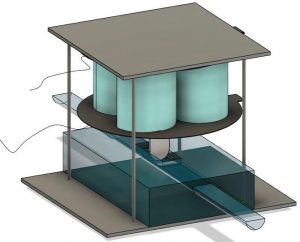
バルブは、電動誘電エラストマーアクチュエータ(「DEA」)と柔らかい流体チャネル(図を参照)を組み合わせて、数十万サイクル実行できるアクチュエータを製造します。
「これらのソフトバルブは応答時間が速く、油圧アクチュエータのニーズに一致する流体圧力と流量を制御できます」と、研究員のSiyiXu氏は述べています。 「これらのバルブは、数百マイクロリットルから数十ミリリットルの範囲の内部容積を持つ油圧アクチュエータの制御を可能にします。」
アクチュエータの高さ7mmバージョンは、重量が350mg、少なくとも500Hzで動作し、51ms以内に最大40kPaおよび100ml /分で流体を制御します。チーム。 3.5kVを超える駆動電圧が必要です。
この作業は、米国科学アカデミーが発行した「ソフト油圧アクチュエータを制御するための動的電動ソフトバルブ」に記載されています。フルアクセスには支払いが必要です。