
« Les systèmes de régulation rigides d'aujourd'hui limitent considérablement l'adaptabilité et la mobilité des robots mous entraînés par des fluides », a déclaré le professeur Robert Wood de l'école d'ingénierie et de sciences appliquées de Harvard (SEAS). « Nous avons développé des vannes souples et légères pour contrôler les actionneurs hydrauliques souples qui ouvrent des possibilités de commandes embarquées souples pour les futurs robots souples fluidiques. »
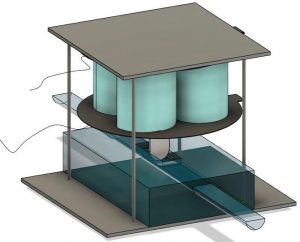
Les vannes associent un actionneur électrique en élastomère diélectrique (« DEA ») à un canal de fluide souple (voir schéma) pour produire un actionneur pouvant fonctionner pendant des centaines de milliers de cycles.
"Ces vannes souples ont un temps de réponse rapide et sont capables de contrôler la pression fluidique et les débits qui correspondent aux besoins des actionneurs hydrauliques", a déclaré le chercheur Siyi Xu. "Ces vannes nous permettent de contrôler des actionneurs hydrauliques avec un volume interne allant de centaines de microlitres à des dizaines de millilitres."
Selon le équipe. Des tensions d'entraînement supérieures à 7kV sont requises.
Le travail est décrit dans « A dynamic electricly driven soft valve for control of soft Hydraulic Actors », publié par l'Académie nationale des sciences des États-Unis – paiement requis pour un accès complet.