
"오늘날의 엄격한 규제 시스템은 유체 구동 소프트 로봇의 적응성과 이동성을 상당히 제한합니다."라고 하버드 공학 및 응용 과학 학교(SEAS)의 로버트 우드 교수가 말했습니다. "우리는 미래의 유체 소프트 로봇을 위한 부드러운 온보드 제어의 가능성을 열어주는 소프트 유압 액추에이터를 제어하기 위해 부드럽고 가벼운 밸브를 개발했습니다."
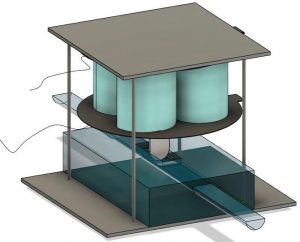
밸브는 전기 구동 유전체 엘라스토머 액추에이터('DEA')와 부드러운 유체 채널(다이어그램 참조)을 결합하여 수십만 사이클 동안 작동할 수 있는 액추에이터를 생성합니다.
동료 연구원인 Siyi Xu는 “이 소프트 밸브는 응답 시간이 빠르고 유압 액추에이터의 요구 사항에 맞는 유체 압력과 유량을 제어할 수 있습니다. "이 밸브는 수백 마이크로리터에서 수십 밀리리터에 이르는 내부 부피를 가진 유압 액추에이터를 제어할 수 있게 해줍니다."
7mm 높이 버전의 액츄에이터는 무게가 350mg이고 최소 500Hz에서 작동하며 유체를 51ms 이내에 최대 40kPa 및 100ml/분으로 제어합니다. 팀. 3.5kV 이상의 구동 전압이 필요합니다.
이 작업은 미국 국립 과학 아카데미에서 발행한 '소프트 유압 액추에이터 제어를 위한 동적 전기 구동 소프트 밸브'에 설명되어 있습니다.