
"ระบบควบคุมที่เข้มงวดในปัจจุบันจำกัดความสามารถในการปรับตัวและความคล่องตัวของหุ่นยนต์นุ่มที่ขับเคลื่อนด้วยของเหลวได้มาก" ศาสตราจารย์โรเบิร์ต วูด แห่งโรงเรียนวิศวกรรมศาสตร์และวิทยาศาสตร์ประยุกต์ (SEAS) ของฮาร์วาร์ดกล่าว “เราได้พัฒนาวาล์วแบบอ่อนและน้ำหนักเบาเพื่อควบคุมแอคทูเอเตอร์ไฮดรอลิกแบบอ่อน ซึ่งเปิดโอกาสให้มีการควบคุมแบบนุ่มนวลบนบอร์ดสำหรับหุ่นยนต์แบบฟลูอิดดิกส์ในอนาคต”
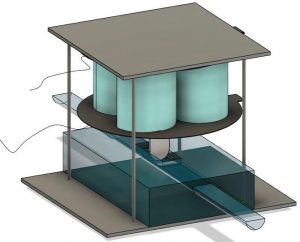
วาล์วรวมตัวกระตุ้นอิลาสโตเมอร์อิเล็กทริกที่ขับเคลื่อนด้วยไฟฟ้า ('DEA') เข้ากับช่องของเหลวแบบอ่อน (ดูแผนภาพ) เพื่อสร้างแอคทูเอเตอร์ที่สามารถทำงานได้หลายแสนรอบ
“ซอฟต์วาล์วเหล่านี้มีเวลาตอบสนองที่รวดเร็ว และสามารถควบคุมแรงดันของเหลวและอัตราการไหลที่ตรงกับความต้องการของแอคทูเอเตอร์แบบไฮดรอลิก” Siyi Xu ผู้ร่วมวิจัย “วาล์วเหล่านี้ทำให้เราสามารถควบคุมแอคทูเอเตอร์ไฮดรอลิกที่มีปริมาตรภายในตั้งแต่หลายร้อยไมโครลิตรไปจนถึงหลายสิบมิลลิลิตร”
แอคชูเอเตอร์รุ่นสูง 7 มม. มีน้ำหนัก 350 มก. และทำงานอย่างน้อย 500 เฮิรตซ์ ควบคุมของเหลวได้สูงถึง 51kPa และ 40 มล./นาทีภายใน 100 มิลลิวินาที – เมื่อเทียบกับวาล์วแบบอ่อนรุ่นก่อนหน้าที่ทำงานที่ <3.5kPa และ <6 มล./นาที ตาม ทีม. ต้องใช้แรงดันไฟฟ้าของไดรฟ์ที่สูงกว่า 1kV
งานนี้ได้อธิบายไว้ใน 'ซอฟต์วาล์วที่ขับเคลื่อนด้วยไฟฟ้าแบบไดนามิกสำหรับการควบคุมแอคทูเอเตอร์ไฮดรอลิกแบบอ่อน' ซึ่งตีพิมพ์โดย National Academy of Science แห่งสหรัฐอเมริกา - ต้องชำระเงินสำหรับการเข้าถึงแบบเต็ม