
"Hodie systemata rigida ordinatio aptabilitatem et mobilitatem fluidorum robotarum mollium agitatarum multum circumducens", Professor Robert Wood dixit scholae Harvardianae scientiarum operandi et applicatae. "Valvulae molles et leves elaboraverunt ad refrenandum actus mollis hydraulicas, quae possibilitates aperiunt pro mollis in tabula moderandis robots mollibus fluidicis futuris."
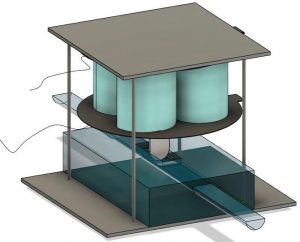
Valvulae electricum elastomerum dielectricum ('DEA') cum canali fluido molli (vide diagrammate) coniungunt ut actuator qui per centena milia cyclorum currere potest.
"Haec valvulae molles tempus ieiunium habent et possunt moderari pressionem fluidorum et fluere rates quae necessitates actuatorum hydraulicarum aequant," indagator conservus Siyi Xu. "Haec valvulae actuatoria hydraulica cum volumine interno vndique a centenis microlitrorum usque ad decem millilitra nobis imperant."
Versio actuatoris 7mm alta ponderat 350mg et opus saltem 500Hz, liquores moderans usque ad 51kPa et 40ml/minutos intra 100ms - comparatis valvulae mollibus prioribus quae in <3.5kPa et <6 mL/minutae sunt, secundum quadrigis. Voltages supra 1kV requiruntur.
Opus descriptum est "Valvula dynamica electrically eiectae valvae mollis pro potestate actuatorum hydraulicorum mollis", a US National Academiae Scientiarum edito - solutionis accessus requisiti.