
“Los rígidos sistemas de regulación actuales limitan considerablemente la adaptabilidad y movilidad de los robots blandos impulsados por fluidos”, dijo el profesor Robert Wood de la escuela de ingeniería y ciencias aplicadas de Harvard (SEAS). "Hemos desarrollado válvulas suaves y livianas para controlar actuadores hidráulicos suaves que abren posibilidades para controles suaves a bordo para futuros robots fluidos suaves".
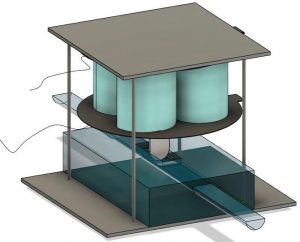
Las válvulas combinan un actuador de elastómero dieléctrico alimentado eléctricamente ('DEA') con un canal de fluido blando (ver diagrama) para producir un actuador que puede funcionar durante cientos de miles de ciclos.
“Estas válvulas blandas tienen un tiempo de respuesta rápido y pueden controlar la presión fluídica y los caudales que se ajustan a las necesidades de los actuadores hidráulicos”, dijo el investigador Siyi Xu. "Estas válvulas nos permiten controlar los actuadores hidráulicos con un volumen interno que va desde cientos de microlitros hasta decenas de mililitros".
Una versión de 7 mm de alto del actuador pesa 350 mg y funciona al menos a 500 Hz, controlando fluidos de hasta 51 kPa y 40 ml / minuto en 100 ms, en comparación con las válvulas blandas anteriores que funcionaban a <3.5 kPa y <6 ml / minuto, según el equipo. Se requieren voltajes de accionamiento superiores a 1 kV.
El trabajo se describe en 'Una válvula blanda dinámica accionada eléctricamente para el control de actuadores hidráulicos suaves', publicado por la Academia Nacional de Ciencias de EE. UU. - Se requiere pago para el acceso completo.