
“De huidige rigide regelsystemen beperken het aanpassingsvermogen en de mobiliteit van door vloeistof aangedreven zachte robots aanzienlijk”, zegt professor Robert Wood van de Harvard School of Engineering and Applied Sciences (SEAS). “We hebben zachte en lichtgewicht kleppen ontwikkeld om zachte hydraulische actuatoren te besturen, die mogelijkheden bieden voor zachte bediening aan boord van toekomstige fluïdische zachte robots.”
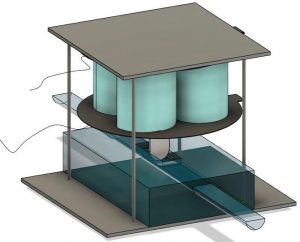
De kleppen combineren een elektrisch aangedreven diëlektrische elastomeeractuator ('DEA') met een zacht vloeistofkanaal (zie diagram) om een actuator te produceren die honderdduizenden cycli kan draaien.
“Deze zachte kleppen hebben een snelle responstijd en kunnen de vloeistofdruk en debieten regelen die voldoen aan de behoeften van hydraulische actuatoren”, zegt collega-onderzoeker Siyi Xu. “Deze kleppen geven ons controle over hydraulische actuatoren met een intern volume variërend van honderden microliters tot tientallen milliliters.”
Een 7 mm hoge versie van de actuator weegt 350 mg en werkt op minimaal 500 Hz, waarbij vloeistoffen tot 51 kPa en 40 ml/minuut binnen 100 ms worden geregeld – vergeleken met eerdere zachte kleppen die werkten bij <3.5 kPa en <6 ml/minuut, volgens de team. Aandrijfspanningen boven 1 kV zijn vereist.
Het werk wordt beschreven in 'A dynamic electriclydriven soft valve for control of soft hydraulic actuators', uitgegeven door de Amerikaanse National Academy of Science – betaling vereist voor volledige toegang.