
TMCM-1321, ut notum est, duos periodos motores bipolaris gradatim moderatur et includit magneticam encoder et digitalem inputa encoder optica.
Est 28 x 28mm Module, licet hoc ampliore spatio indigeat quod «commendatur ad iungendum electrolyticum» capacitor magnitudinum significantium – 470µF 35V exempli gratia – ad potestatem supplendi lineas iuxta TMCM-1321 », iuxta societatem.
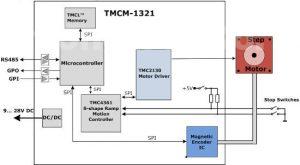

Modulus designatus est per occipitium motoris stepperi conscendi, qui magnetem tergo scapi adnexum habet ad encoder eius operandum. Feedback ab hac compositione cum instructionibus motuum per RS-485 interfaciem permittit unitatem movere situ motorio a puncto ad punctum, adhuc regente electione ramping linearis, societatis propriae 'SixPoint' rapiendi vel S informibus rapiendi.
Pluma notatum StallGuard2 praebet onus sensorium mensurae utens in dorso EMF gyrorum, et pro stabulo detectionis adhiberi potest.
"Cum eligendo energiam agentem coegi, fabrum ad servo impellit spectare solent", director Trinamicus Jonas Proeger dixit. “Motores tamen stepperorum torques multo superiores habent quam motores servos magnitudine comparabilis velocitatum minorum. Hoc motores stepper bene idoneos facit ad calcem machinae tollendam sine positione accurationis amittendae cum eas cum potestate clausula coniunges. Tu efficientiam motoris servo motoris ad stepper motorem sumptus est."
Disposita est coil excursus usque ad 0.7Arms (1A apicem) et 24Vdc nominalis copia quae trans 9 ad 28V variari potest. Tres inputationes digitales (5V nominales, 24V compatibles) adhiberi possunt pro fine switch et domestica initibus initibus vel ut propositi generalis inputs.